:quality(80)/p7i.vogel.de/wcms/d5/09/d5091cd9a582aa0f780740ec4faac973/0130381601v2.jpeg "Die Besucher freuten sich vor allem über das vielfältige Programm. (Bild: Stefan Bausewein/VCG)")
:quality(80)/p7i.vogel.de/wcms/b6/f5/b6f57042111d87f229188016760aa9be/0130112613v2.jpeg "„Den Teilnehmern werden auch Strategien vorgestellt, wie sie nicht nur gesetzliche Vorgaben erfüllen, sondern auch Innovationsführer in ihrem Sektor werden können“, so Michelle Duerksen, Sustainability Sales Manager bei Schneider Electric. (Bild: Schneider Electric)")
:quality(80)/p7i.vogel.de/wcms/02/ba/02baa569447a740c8090977765087852/0129990653v1.jpeg "Michelle Duerksen (Sustainability Sales Manager Schneider Electric, links oben), Jens Müller (Geschäftsführung Müller und Partner Sachverständige, links unten). Von rechts oben nach unten: Benjamin Zierold (Geschäftsführer Koenig & Bauer), Wolfgang Wiedemann (Director Murrelektronik) und Thomas Droth (Head of Industry Solutions Mitsubishi Electric). (Bild: Schneider Electric, Laura Boysen/Müller und Partner Sachverständige, Murrelektronik, König & Bauer, Mitsubishi Electric)")
:quality(80)/p7i.vogel.de/wcms/1f/4e/1f4eb9b8068cd0205a3d8975c49e5e8a/0129856192v3.jpeg "\"Der Engpass ist selten die KI selbst, sondern die Frage, wo Intelligenz sinnvoll in bestehende Prozesse integriert werden kann. Wenn KI nur ‚neben' der Maschine arbeitet, bleibt der Nutzen begrenzt\", sagt Dr. Andreas de Jonge, CEO der de Jonge GmbH. (Bild: de Jonge)")
:quality(80)/p7i.vogel.de/wcms/89/5e/895e9264dc75bdc5ca2cd31f4e7804f7/newsimage422541-1631x917v1.png "Privacy Guardrail setzt genau an dem Moment an, in dem aus vertraulichem Text ein KI-Prompt wird. (Bild: DFKI)")
:quality(80)/p7i.vogel.de/wcms/17/0f/170f167b9fa21ba6f6c690137afb337e/-sb-1001-4500x2530v1.jpeg "Das sind die Gewinner und Finalisten des Automation App Awards. (Bild: Stefan Bausewein)")
:quality(80)/p7i.vogel.de/wcms/e8/f1/e8f14c0fdc8594771793483749cc9b8e/0131052730v2.jpeg "Dr. Kevin Cremanns (Bild: Cadfem)")
:quality(80)/p7i.vogel.de/wcms/26/60/2660ea7568da9ad8fc9373fd57541d6d/adobestock-2007383736--c2-a9-20masque-20-e2-80-93-20stock-adobe-com-ki-generiert-5460x3072v1.jpeg "Die Einführung des digitalen Produktpasses erfolgt schrittweise und wird durch regulatorische Vorgaben sowie branchenspezifische Initiativen begleitet. (Bild: © Masque _ stock.adobe.com _ KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/b7/1d/b71d81f78ddc85b890c0f84eadca504e/01-imago-vision-box-agex5-1-cmyk-2047x1151v1.jpeg "Die Vision Box Age X5.1 realisiert viele Funktionen in Echtzeit. Der leistungsstarke Prozessor wird passiv über das gerippte Gehäuse gekühlt. (Bild: Imago Technologies)")
:quality(80)/p7i.vogel.de/wcms/b8/2b/b82b8ba6c5c43b2de4d44e8582d88565/daniel-hager-zvei-praesident-bildnachweis-zvei-alexander-grueber-1902x1070v1.jpeg "Neuer ZVEI-Präsident Daniel Hager möchte Fokus auf Leistung, Innovation und Wettbewerbsfähigkeit legen. (Bild: Alexander Grüber, ZVEI)")
:quality(80)/p7i.vogel.de/wcms/7a/a9/7aa99c53cf61e549eaf92cc2addb62e9/0131668020v2.jpeg "Ekrem Yigitdöl (re.) übergibt die Position des Managing Directors an seinen Nachfolger Michael Riester (li.). (Bild: Open Industry 4.0 Alliance)")
:quality(80)/p7i.vogel.de/wcms/ee/f5/eef5bf691dadc93de31c9b3d272bdcf3/0131647260v2.jpeg "Anstatt Arbeitskräfte zu ersetzen, konzentrieren sich deutsche Hersteller darauf, die menschlichen Fähigkeiten durch Technologie zu erweitern. Das zeigen die deutschen Ergebnisse des 11. „State of Smart Manufacturing Report“ von Rockwell Automation.
(Bild: © littlewolf1989 - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/6d/d9/6dd9069effd67aff43f134f04f84a2a9/0131652645v2.jpeg "Der lüfterlose Industrie Embedded PC namens Rocksmart RSX1000 (Bild: Werock)")
:quality(80)/p7i.vogel.de/wcms/ea/9e/ea9e4f2c125ec5104c325e471be60efe/0131632764v2.jpeg "Stefan Huber (Head of Research, FH Salzburg) und Martin Haidacher (Innovation Manager, B&R) gemeinsam mit Technik von B&R
(Bild: B&R Industrie-Elektronik GmbH)")
:quality(80)/p7i.vogel.de/wcms/30/fe/30fed694c422d9fa70be1def67df9e96/0131594908v2.jpeg "Nord hat unter anderem die dezentralen Frequenzumrichter der Nordac-On-Familie mit neuen Funktionen im Bereich der Funktionalen Sicherheit ausgestattet. (Bild: Nord Drivesystems)")
:quality(80)/p7i.vogel.de/wcms/cd/b1/cdb1265f45858b721a7e509138bfcb54/abb-ie6-synrm-1921x1080v1.png "Die IE6-SynRM-Motoren entsprechen der Größe von Standard-Asynchronmotoren und können somit bei Ventilatoren, Pumpen, Kompressoren und anderen Anwendungen ausgetauscht werden. (Bild: ABB)")
:quality(80)/p7i.vogel.de/wcms/00/9b/009bb011d052fb2baf38b2aa0fb2d1a3/battery-20pack-20assembly-20line-1772x997v1.jpeg "Modular aufgebaut: eine Montagelinie für Batteriepacks von Webasto. Die Produktionslinie wurde im Werk von Webasto in Schierling, Deutschland, integriert. (Bild: Kuka Group)")
:quality(80)/p7i.vogel.de/wcms/b8/f0/b8f01640b052b6fdbf9f0068875d386c/igus-20iggy-20rob-20home-3507x1973v1.jpeg "Speziell für den Einsatz im Servicebereich hat igus mit dem Iggy Rob Home einen neuen kostengünstigen und CE-konformen humanoiden Roboter entwickelt. (Bild: Igus SE & Co. KG)")
:quality(80)/p7i.vogel.de/wcms/15/4f/154f1619032480b448049a76483378a2/acm-2025-08-502-01-1920x1079v1.jpeg "Scarabaeus, der innovative Mulchroboter zur Pflege von Obstplantagen und Grünflächen, eine marktreife Konstruktion von Brüggli Industrie aus der Schweiz.
(Bild: Brüggli Industrie)")
:quality(80)/p7i.vogel.de/wcms/77/41/7741461ac9c226c25169608bb0253d83/sereact-20pm-20cortex-202-0-20bild-204-2988x1682v1.jpeg "Cortex 2.0 ermöglicht Robotern, bestehende Maschinen selbstständig zu bedienen. (Bild: Sereact)")
:quality(80)/p7i.vogel.de/wcms/96/9e/969ef5c09a3cc13997c77de1ecbfeb37/260521-header-487x274v1.jpeg "Anlässlich der Fußball-Weltmeisterschaft hat das DPMA seine Galerie „Fußball und Technik“ um aktuelle Erfindungen erweitert. (Bild: DPMA)")
:quality(80)/p7i.vogel.de/wcms/00/fd/00fd5be215056a7e88ccf73dfa362b47/0131475353v2.jpeg "Sabine Scheunert, Vorsitzende der Geschäftsführung in Zentraleuropa bei Dassault Systèmes (Bild: Dassault Systèmes )")
:quality(80)/p7i.vogel.de/wcms/6c/66/6c6647dd81976d2c940f9514ec01f02a/schraub-20tec-074-3000x1687v1.jpeg "Der fachliche Austausch ist das, was die Regionalmesse Schraubtec ausmacht. (Bild: PHOTOVISION-DH )")
:quality(80)/p7i.vogel.de/wcms/41/a7/41a79c3bb48e11f4c2ae8b33365bcd2f/engin-akyurt-euro-6771167-8192x4608v1.jpeg "Eine Arbeitsstunde in Deutschland war 2025 im Vergleich zu 2020 um 22,3 Prozent teurer, teilt das statistische Bundesamt mit. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/36/93/36938d694f48ccd4d1f5f9e401fee836/adobestock-704571920--c2-a9-20gumpapa-20-e2-80-93-20stock-adobe-com-6000x3373v1.jpeg "Der MINT-Frühjahrsreport 2026 zeigt: MINT-Nachwuchs bricht weiter ein. (Bild: © gumpapa – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/f7/2e/f72ec1cba42abe5d3b3c2615ff37c2ea/adobestock-1840092295--c2-a9-20infiniteflow-20-e2-80-93-20stock-adobe-com-3840x2158v1.jpeg "Vier von zehn Unternehmen (40 Prozent) sehen bereits, dass der Bedarf an KI-bezogenen Qualifikationen und Kompetenzen in ihrer Organisation wächst, zeigt die TÜV Weiterbildungsstudie 2026. (Bild: © InfiniteFlow – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/58/63/586379bda19d8f06e6015cecb41a4967/kampagnenbild-1947x1095v1.png "(Bild: ANSYS Germany GmbH )")
:quality(80)/p7i.vogel.de/wcms/d1/12/d112dfa6e7df4c7af715a4833483f659/0126977441v1.jpeg "DIN RAIL SMART PROTECTION: RACPRO1 E-FUSE MODULE (Bild: RECOM Power GmbH)")
:quality(80)/images.vogel.de/vogelonline/bdb/1651700/1651739/original.jpg "Apps helfen nicht nur im Alltag – auch auf der Arbeit können sie vieles erleichtern. (©mast3r/stock.adobe.com)")
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/113800/113818/65.jpg "Turck_Your_Global_Automation_Partner.jpg ()")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/76800/76895/65.jpg "FAULHABER_120mm.jpg ()")
Synchrone PDO-Übertragung
Eine gleichmäßige Verteilung der Buslast ist eine der wichtigsten Aufgaben bei der Systemauslegung. So kann man die maximale Buslast und die daraus resultierende maximale Übertragungsgeschwindigkeit möglichst gering halten. In CANopen gibt es dazu die synchrone Übertragung von PDOs. Das die PDO auslösende Ereignis ist der Empfang der Sync-Nachricht. Die Sync-Nachricht wird von einem Teilnehmer zentral versendet. Es muss nicht unbedingt das Gerät mit der NMT-Master-Funktion (Netzwerkmanagement-Master) sein. Alle CANopen-Geräte, die synchrone PDOs besitzen, übertragen nach dem Empfang der Sync-Nachricht die entsprechenden PDOs. Damit sich schnell und langsam ändernde Prozessdaten in dem System befinden können, kann der Systemintegrator festlegen, ob ein synchrones PDO auf den Empfang jeder, jeder zweite, usw. Sync-Nachricht reagieren soll. Durch ein optimiertes PDO-Mapping (alle sich langsam ändernden Prozessdaten in ein PDO und sich schneller ändernde Prozessdaten in andere PDOs) kann man so die PDO-Übertragung bezüglich der Buslast optimieren. Selbstverständlich muss der Systementwickler darauf achten, dass die Sync-Zykluszeiten so gewählt sind, dass keine Prozessdaten verloren gehen.
Wird ein Empfangs-PDO als synchron konfiguriert, trägt der CANopen-Protokoll-Stack die empfangenen Prozessdaten erst nach dem Empfang der folgenden Sync-Nachricht in das CANopen-Objektverzeichnis ein. Somit hat man ein komplett synchrones PDO-Verhalten: Die synchronen Sende-PDOs werden gleichzeitig getriggert und die empfangenen synchronen Prozessdaten werden mit der nächsten Sync-Nachricht gleichzeitig in allen Geräten verarbeitet. Dieses synchrone Verhalten wird beispielsweise in Mehrachssteuerungen angewendet. Es eignet sich aber auch zur zeitgleichen Erfassung von Messdaten.
Um die Buslast weiter zu reduzieren, hat der Systementwickler in CANopen die Möglichkeit, PDOs auch azyklisch zu übertragen, d. h., diese PDOs werden nur gesendet, wenn die Sync-Nachricht und ein spezifisches Ereignis (z. B. die Wertänderung eines gemappten Prozessdatums) eingetreten ist. So kann man nicht nur die Buslast über die Zeit optimal verteilen, sondern auch noch die Buslast reduzieren.
Eine weitere interessante Möglichkeit ist die unterschiedliche Konfiguration von Sende- und Empfangs-PDO. So kann man beispielsweise das Sende-PDO als synchron konfigurieren und die korrespondierenden Empfangs-PDO als asynchron. So erhält man zeitgleich erfasste Prozessdaten, die in den empfangenden Geräten sofort verarbeitet werden. Man kann aber auch PDOs asynchron senden und synchron empfangen. Dann hat man eine zeitgleiche Verarbeitung der ereignis-getriggerten Prozessdaten.
Der Entwickler von CANopen-Geräten muss allerdings sicherstellen, dass zum Zeitpunkt des Empfangs der Sync-Nachricht die Prozessdaten aktualisiert wurden, insbesondere wenn das Gerät intern die Prozessdaten periodisch auswertet. Da der Sync-Zyklus nicht mit der in der internen Verarbeitung synchronisiert ist, kann es dazu führen, dass die Prozessdaten erst nach dem Senden der synchronen PDOs aktualisiert werden. Um dieses Problem zu vermeiden, kann man den internen Verarbeitungszyklus mit der Sync-Periode synchronisieren oder intern die Prozessdaten ereignis-orientiert verarbeiten. Zu Letzterem ist allerdings ein lokales Echtzeit-Betriebssystem erforderlich.
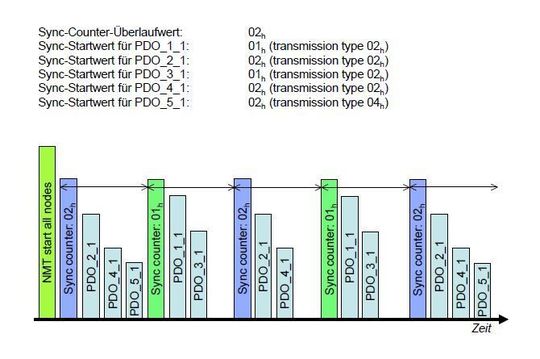
In einigen Anwendungen benötigt man für eine optimale Buslastverteilung mehrere Sync-Nachrichten. Dies wird in CANopen virtuell mit dem Sync-Zähler erreicht. Der 1-Byte-Sync-Zähler wird optional in der Sync-Nachricht übertragen. Dieser ist ab der CANopen-Spezifikation Version 4.2 verfügbar. In dem Sync-Counter-Überlauf-Parameter legt der Systementwickler fest, bei welchem Wert der Zähler überläuft und wieder bei „1“ startet. In jedem synchron gesendeten PDO muss der Systementwickler den Startwert konfigurieren (Sync-Start-Value). Reagiert die synchronen Sende-PDOs nicht auf jede Sync-Nachricht, so muss der Systementwickler darauf achten, dass Startwert und Anzahl der „bedienten“ Sync-Nachrichten nicht zu einer ungleichmäßig verteilten Buslast führen. Ein einfaches Beipsiel zeigt die Abbildung: Der Sync-Counter läuft beim Wert „2“ über und startet wieder mit dem Wert „1“. Bis auf ein PDO reagieren alle auf jede zweite Sync-Nachricht. Nur ein PDO „bedient“ jede vierte Sync-Nachricht. Selbstverständlich kann man mit diesem erweiterten Sync-Verfahren auch komplexere Szenarien realisieren.
Konfigurierbare PDO-Priorität
Um das Verhalten optimal an die Anwendung anzupassen, kann der Systementwickler jedem Sende-PDO ein definierte Priorität für den Buszugriff zuweisen. Dies erfolgt über die Konfiguration der COB-ID-Parameter, in den die CAN-Priorität festgelegt wird. Prinzipiell ist es sinnvoll, den synchronen PDOs eine höhere Priorität als den asynchron übertragenen PDOs zuzuordnen. Doch Ausnahmen bestätigen auch hier die Regel: Es mag aus Sicht der Anwendung extrem wichtige PDOs geben, die deshalb eine höhere Priorität als die Synchronen PDOs aufweisen müssen. Der Anwender kann also auch diesbezüglich flexibel das Systemverhalten festlegen.
PDO-Querkommunikation
In CANopen hat der Systementwickler viele Freiheitsgrade bei der Konfiguration der PDOs. Neben dem konfigurierbaren Inhalt (PDO-Mapping), der einstellbaren Übertragungs- und Empfangsart (PDO-Transmission-Typ) und der Priorisierung von PDOs kann der Systementwickler auch noch eine PDO-Querkommunikation festlegen. In vielen Master/Slave-Kommunikationssystemen sendet und empfängt der Master alle Prozessdaten. Die von den Sensoren erfassten Prozessdaten werden also erst im nächsten Buszyklus an die Aktuatoren gesendet. Dies erfordert schnelle Kommunikationsysteme, um die Verzögerungen beim Empfang der Sensordaten in den Aktuatoren möglichst gering zu halten. Eine direkte Kommunikation zwischen Sensoren und Aktuatoren vermeidet diese Verzögerung. In CANopen kann man die PDOs so konfigurieren, dass alle an einem Prozessdatum interessierten Empfänger, das PDO direkt empfangen (PDO-Multicast, PDO-Broadcast). Diese als PDO-Linking bezeichnete Konfigurationsoption ist vom Systementwickler vorzunehmen.
Alle beschriebenen PDO-Konfigurationsoptionen kann der Systementwickler sozusagen von Hand einstellen. Um ihm die Arbeit zu erleichtern, bieten einige Firmen Software-Werkzeuge an, mit denen man die PDO-Konfiguration automatisch oder halb-automatisch vornehmen kann. Durch die Standardisierung der PDO-Parameter sind die Tools in der Lage, die Fähigkeiten eines CANopen-Gerätes zu erkennen und dem Systementwickler eine optimale PDO-Konfiguration „vorzuschlagen“. Sicherlich hängt die Qualität der vorgeschlagenen PDO-Kommunikation von den implementierten Algorithmen ab. Deshalb bieten die Konfigurationstools die Möglichkeit, die PDO-Konfiguration von Hand nachzubessern. Mit entsprechenden Simulationstools kann man dies sogar vor der Systemimplementierung testen.
Keine relativen Daten übertragen
Da Prozessdatenobjekte in einem CAN-Datenframe übertragen werden, müssen die übertragenen Prozessdaten immer absolut sein. Das CAN-Protokoll spezifiziert nämlich eine unterschiedliche Interpretation für Sender und Empfänger, wenn das letzte Bit des EOF-Feldes dominant gestört ist. Die Empfänger haben zu diesem Zeitpunkt die Nachricht als korrekt akzeptiert und interpretieren das dominante Bit als Überlast-Bedingung. Der Sender betrachtet das dominante Bit dagegen als einen Fehler und überträgt deshalb die Nachricht noch einmal. Die Empfänger erhalten also das PDO zweimal. Bei einer Übertragung von relativen Daten (z.B. Deltawerte oder Inkrementen) würde dies zu einem applikativen Fehlverhalten führen. Beispiel: Das Kommando „erhöhe die Temperatur um 10 °C“ würde doppelt ausgeführt zu einer unerwünscht hohen Temperatur führen!
Holger Zeltwanger, Managing Director, CAN in Automation
(ID:296484)
:quality(80)/p7i.vogel.de/wcms/69/a2/69a2406ea78b39053542eb56ebcf7f57/0130378625v2.jpeg "Sichert und überwacht Stromkreise direkt im Feld: Turcks IP67-Sicherung TBIF mit IO-Link (Bild: Turck GmbH)")
:quality(80)/p7i.vogel.de/wcms/aa/0d/aa0d5886c5add0eae8e7db61284b179d/0125539458v2.jpeg "Mechanische Baugruppe des Voyager4-Sensorgehäuses (Bild: Analog Devices)")