:quality(80)/p7i.vogel.de/wcms/2b/d4/2bd40168bce48c337b86a451b11fd865/hqdipr202606197409-02-1000x563v1.jpeg "Sinumerik One bildet die technologische Basis für das Retrofit von Walzenschleifmaschinen und ermöglicht eine moderne, leistungsfähige CNC-Steuerung. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/61/71/617123e3846b0079e580895c5bc37d40/2-995x560v1.png "Das Forschungsteam an der TU München misst und regelt die Sehnenkräfte an dem Roboter. Das Ziel des Forschungsprojekts sind neuartige Regelungskonzepte. (Bild: TU München)")
:quality(80)/p7i.vogel.de/wcms/d5/09/d5091cd9a582aa0f780740ec4faac973/0130381601v2.jpeg "Die Besucher freuten sich vor allem über das vielfältige Programm. (Bild: Stefan Bausewein/VCG)")
:quality(80)/p7i.vogel.de/wcms/b6/f5/b6f57042111d87f229188016760aa9be/0130112613v2.jpeg "„Den Teilnehmern werden auch Strategien vorgestellt, wie sie nicht nur gesetzliche Vorgaben erfüllen, sondern auch Innovationsführer in ihrem Sektor werden können“, so Michelle Duerksen, Sustainability Sales Manager bei Schneider Electric. (Bild: Schneider Electric)")
:quality(80)/p7i.vogel.de/wcms/9e/aa/9eaa7c35ae37442f131b821e70ac300a/aveva-digitales-20ecosystem-8688x4885v1.jpeg "Der KI-Assistent identifiziert die relevanten Daten und liefert eine zusammengefasste Antwort. Bei Bedarf generiert er direkt eine Visualisierung als Dashboard oder Trendansicht, die sich speichern und teilen lässt. (Bild: Aveva)")
:quality(80)/p7i.vogel.de/wcms/0d/7c/0d7c8417e1b596c83da6912c9a6d62f5/adobestock-2012652009--c2-a9-20masque-20--20stock-adobe-com-5460x3072v1.jpeg "Physical AI erfordert aufgrund der engen Verzahnung von Wahrnehmung, Entscheidungslogik und Aktion erweiterte Sicherheitskonzepte. (Bild: Masque - stock.adobe.com Masque - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/7a/12/7a12d7ab565963a22c21ba8b30bf542d/visometry-kunde-wisag-1-3045x1714v1.jpeg "Komplexe Schweißbaugruppen schnell und flexibel kontrolliert: Das AR-Tool Twyn hat die Qualitätsprüfung bei Wisag beschleunigt, vereinfacht und verbessert. (Bild: Visometry)")
:quality(80)/p7i.vogel.de/wcms/7e/9b/7e9bfe170a3b2aa28403d4863dfb191d/adobestock-774959291-ashrafulislam-4779x2688v1.jpeg "Es stellt sich die Frage, wie die schnell wachsende Nachfrage an Energie und neue Technologien mit der bereits vorhandenen Infrastruktur in Einklang gebracht werden können. (Bild: © AshrafulIslam – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/5f/94/5f948e97ebbd674879b4ecde79fb8c12/0132092944v2.jpeg "Der Grundlagentag Wärmemanagement ist ein wesentlicher Bestandteil der Fachkonferenz „Power of Electronics” und hat sich ursprünglich aus den „Cooling Days” entwickelt. (Bild: Stefan Bausewein)")
:quality(80)/p7i.vogel.de/wcms/e2/73/e273e6370fb756735ac06d7ef14bf67c/adobestock-1877003493-puhimec-3521x1983v1.jpeg "Die Elektrifizierung der Industrie wird zur betriebswirtschaftlichen Notwendigkeit. Sie ermöglicht, Energie aus einem System zu beziehen, das sich besser steuern, prognostizieren und optimieren lässt als fossile Alternativen. (Bild: © puhimec – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/69/46/6946c24861c25a7d75228f63cc6a5253/0131864932v2.jpeg "Auf das IO-Link Gesamtpaket kommt es an. Wenn das Zusammenspiel von Sensoren, leistungsstarken Mastern und einem herstellerunabhängigen Konfigurationstool stimmt, ist eine deutlich gesteigerte Maschinenperformance möglich. (Bild: Baumer)")
:quality(80)/p7i.vogel.de/wcms/52/9e/529ed65065534bea9f29da7fe1346482/0131840272v2.jpeg "Jürgen Greger, Experte für industrielle Kommunikation bei Lapp. (Bild: Lapp)")
:quality(80)/p7i.vogel.de/wcms/e7/3e/e73e7453e41c35c939d0b3ca17c4eb81/factory-20x-panelteilnehmer-20zum-20thema-20industrie-20im-20wandel-20-e2-80-93-20ohne-20daten--c3-96kosysteme-20keine-20-28ki--29-20zukunft-small-3000x1687v1.jpeg "Panelteilnehmer zum Thema: „Industrie im Wandel – ohne Daten-Ökosysteme keine (KI-) Zukunft?“
Von links nach rechts: Rainer Brehm (SIEMENS), Dr. Stephan Mayer (Trumpf); Prof.Dr. Dipl-Ing Berend Denkena (DMG Mori) Dr. Beate Baron (BMWE), Hagen Heubach (SAP)
(Bild: Factory-x)")
:quality(80)/p7i.vogel.de/wcms/25/67/2567a762b26115eddacae3a2f3b7d560/inovance-20x-20vascat-203-1600x900v1.jpeg "David Bedford Guaus (re.), Country Manager bei Inovance Technology Spain und Technischer Direktor für Inovance in den Regionen Europa und Nordamerika, sagt: „Die gemeinsame Suche nach einer Lösung zur Integration unserer Antriebe in das System hat unsere Zusammenarbeit mit Vascat weiter verbessert und wir hoffen sehr, in Zukunft wieder zusammenzuarbeiten.“ (Bild: Inovance)")
:quality(80)/p7i.vogel.de/wcms/28/5a/285af4d2fc9c346303d06078a497c9ce/energieeffizienz-20in-20der-20antriebstechnik-1-6456x3634v1.png "Durch den Einsatz moderner Frequenzumrichter lassen sich Lastspitzen reduzieren und Energieanteile aus Bremsvorgängen zurückführen. (Bild: Mitsubishi Electric)")
:quality(80)/p7i.vogel.de/wcms/09/81/0981a58a68530db70d8d67ec13d1c823/adobestock-96039220--c2-a9-203dsculptor-20--20stock-adobe-com-6000x3375v1.jpeg "Anwendungen, die im Weltall eingesetzt werden, stellen höchste Anforderungen an Antriebe. (Bild: © 3dsculptor - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/f5/26/f526510e7228ce55782f4c8b24353645/0132185227v1.jpeg "Sperrmüll hat leider das Charakteristikum, dass er aus verschiedensten Mülltypen besteht. Wie man hier aber deutlich erkennen kann, ist Holz durchaus reich vorhanden. Damit der Rohstoff nicht weiter von Hand aussortiert werden muss, haben Forscher sich endlich etwas überlegt ... (Bild: Wertstoff Giller)")
:quality(80)/p7i.vogel.de/wcms/a1/f0/a1f09295410f5c64d5ae85747172dd2c/1858107-5568x3130v1.jpeg "Das Soft-Hand-Exoskelett unterstützt Menschen, deren Hand gelähmt ist. (Bild: Astrid Eckert / TUM)")
:quality(80)/p7i.vogel.de/wcms/66/62/6662a12a8d0fef0b76e59405e493b9be/softgripping-greifer-20im-20einsatz-2-6000x3373v1.jpeg "Weiche Greiferfinger aus FDA-zugelassenem Silikon gewährleisten das schonende Handling empfindlicher Produkte bei hoher Taktrate. (Bild: Soft Gripping GmbH)")
:quality(80)/p7i.vogel.de/wcms/15/13/15131e408122c4777d914ddd607d28f5/yamaha-20picture-202-754x424v1.jpeg "Die siebte Achse am Cobot steigert die Flexibilität in Produktion und Logistik. (Bild: Yamaha Robotics )")
:quality(80)/p7i.vogel.de/wcms/b6/1e/b61ee9620cff0c1e614d908d5036220b/wertsch-c3-b6pfung-kigeneriert-gemini-1018x573v1.jpeg "Digitale Technologien ermöglichen die Erfassung und Auswertung von Daten entlang des gesamten Produktlebenszyklus und gelten als Schlüssel für zirkuläre Wertschöpfung. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/56/7b/567b3d4b554a1dbdcf835918350c021a/symbolbild-wahrnehmung-ki-1364x768v1.jpeg "KI-Modelle verarbeiten visuelle Informationen oft fragmentiert – neue Trainingsansätze setzen hier an. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/93/1a/931a35db6d90693283049b840dcacd2b/st-hannover-149-6048x3400v1.jpeg "Der fachliche Austausch zwischen Besucher und Aussteller ist das, was die Schraubtec ausmacht. (Bild: PHOTOVISION-DH GmbH)")
:quality(80)/p7i.vogel.de/wcms/68/89/6889ce824f7362d1ee31c6114039849d/0131677915v2.jpeg "Nur menschliche Empathie schafft echte Beziehungen. Führungskräfte, die Hoffnung vermitteln und Vertrauen im Alltag leben, verwandeln Risiken automatisierter Entscheidungen in Chancen, die Organisation und Mitarbeitende gleichermaßen stärken. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/ed/02/ed02ce464ed1a39dcd7a617f55a4ffc1/0131677386v2.jpeg "Durch das Nutzen von KI gewinnen Führungskräfte Zeit für Entwicklungsgespräche, Perspektivenarbeit und persönliche Begleitung. Diese menschliche und persönliche Zuwendung signalisiert Mitarbeitern Wertschätzung und eröffnet Zukunftschancen. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/7d/df/7ddf9467a9acc812e8cc29324c3b080e/0131729703v2.jpeg "Zu viele verschiedene Varianten machen das Handling unübersichtlich. Denn ein geändertes Bauteil betrifft nicht nur eine Stückliste, sondern zieht Anpassungen in Prüfplänen, Dokumentation, Parametrierung und Ersatzteillogik nach sich. (Bild: © Radoman Durkovic - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/58/63/586379bda19d8f06e6015cecb41a4967/kampagnenbild-1947x1095v1.png "(Bild: ANSYS Germany GmbH )")
:quality(80)/p7i.vogel.de/wcms/d1/12/d112dfa6e7df4c7af715a4833483f659/0126977441v1.jpeg "DIN RAIL SMART PROTECTION: RACPRO1 E-FUSE MODULE (Bild: RECOM Power GmbH)")
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/113800/113818/65.jpg "Turck_Your_Global_Automation_Partner.jpg ()")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/76800/76895/65.jpg "FAULHABER_120mm.jpg ()")
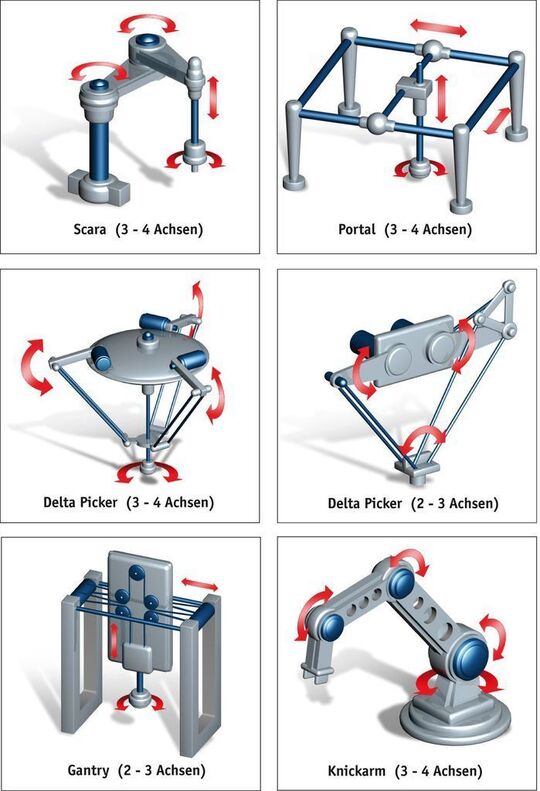
Mit einem solchen integrierten Steuerungssystem können unterschiedliche Roboter-Kinematiken, wie Knickarm-, Gantry-, Scara-, Portal- oder Delta-Roboter angesteuert werden. Nach dem Baukastenprinzip lassen sich einzelne Robotermodule einfach in die Maschinensoftware integrieren.
Die Steuerungssoftware LASAL ist so aufgebaut, dass sich ein Roboter-Modul wie jedes andere Maschinen-Modul in das Gesamtprojekt einbinden lässt. So entsteht eine einheitliche Struktur der Maschinen-Software, und der Programmierer kann sich auf die eigentlichen Maschinen- und Bewegungs-Funktionalitäten konzentrieren. Auch die Einbindung mehrerer Roboter-Kinematiken in einer Anlage kann ohne größeren Programmieraufwand erfolgen.
Dem Maschinenbauer steht mit dem Sigmatek-Systemkonzept eine Lösung aus einem Guss zur Verfügung: Einerseits entfallen durch die Umsetzung des Steuerungskonzeptes mit einer einheitlichen Architektur sämtliche externe Schnittstellen in Hard- und Software. Proprietäre und teure Robotersteuerungen sind nicht mehr notwendig. Andererseits resultiert aus dieser Durchgängigkeit auch eine einheitliche Programmierung, was zu einer Reduzierung des Engineering- und Service-Aufwandes führt.
Komfortable Bewegungsprogrammierung

Die Bewegungsbahn des Roboters, die sogenannte Trajektorie, wird in Form von Linear-, Zirkular- oder Punkt-zu-Punkt-Bewegungen vorgegeben. Komplexere Trajektorien werden durch Sequenzen einzelner Bewegungsabschnitte (Bahnsegmente) angenähert. Die Robotersteuerung soll eine Bahn mit einer möglichst hohen Laufruhe erzielen. Stoß- und ruckfreie Bewegungen sind Voraussetzung für hohe Taktraten, einen schonenden Betrieb des Roboters und ein behutsames Handling der Produkte. Ein Stoß ist ein theoretisch unendlicher Geschwindigkeitssprung, der entsteht, wenn die Bewegungsbahn einen Knick aufweist und daher innerhalb extrem kurzer Zeit eine neue Position erreicht werden soll. Ein Ruck hingegen ist ein endlicher Beschleunigungssprung, der auftritt, wenn die Wegkurve zwar keine Knicke aufweist, aber der dazugehörende Geschwindigkeitsverlauf einen Knick hat. Dies ist der Fall, wenn zwei Bahnsegmente mit unterschiedlicher Krümmung aufeinandertreffen.
Um ruck- und beschleunigungsbegrenzte Trajektorien zu erzeugen, sehen moderne Bahnsteuerungen folgende Strategien vor:
- Genauhalt nach jedem Bahnsegment;
- Überschleifen der Segmentübergänge;
- Interpolation von stützpunktbasierten Bewegungsvorgaben;
- vorausschauende Geschwindigkeitsanpassung (Look-ahead).
Aufgrund der Leistungsfähigkeit und Rechengeschwindigkeit moderner Prozessoren kann die Bewegungssteuerung online gerechnet werden. Dies ist vor allem für die Überwachungsfunktionen und die Betriebssicherheit der Maschine vorteilhaft.
Einheitliches Engineering mit LASAL
Moderne und durchgängige Engineering-Tools wie LASAL sind Voraussetzung für eine Senkung der Kosten bei der Entwicklung und Inbetriebnahme solcher roboter-gestützter Anlagen.

Maschinen müssen einerseits flexibel an spezifische Einsatzfälle anpassbar und andererseits immer einfacher programmier- und bedienbar sein. Daher kommt dem effizienten Entwurf und der Qualität der Software im Maschinen- und Anlagenbau eine immer größere Bedeutung zu. Sigmatek führte das objektorientierte Programmierkonzept bereits im Jahr 2000 in der Automatisierungstechnik ein. Da die Vorteile klar auf der Hand liegen, konnte schnell die Akzeptanz der Anwender gewonnen und der Marktdurchbruch geschafft werden.
(ID:362992)
:quality(80)/p7i.vogel.de/wcms/98/91/98911b8f497a40a114f451ec55b84610/0125585758v1.jpeg "Der interaktive „Blauw Wasser Garten“ im Wissenschaftszentrum Hidrodoe kombiniert Wasserspiel und Umweltbildung – gesteuert durch eine industrietaugliche Automatisierungslösung von Sigmatek. (Bild: Sigmatek)")
:quality(80)/p7i.vogel.de/wcms/15/fe/15fe271957ffd87bb8e5793e7651e39e/0128020424v2.jpeg "Der Frequenzumrichter i650 Motec bietet in Kombination mit dem Synchronmotor m550/m650 eine leistungsstarke und energieeffiziente Lösung. (Bild: Lenze)")