:quality(80)/p7i.vogel.de/wcms/b6/f5/b6f57042111d87f229188016760aa9be/0130112613v2.jpeg "„Den Teilnehmern werden auch Strategien vorgestellt, wie sie nicht nur gesetzliche Vorgaben erfüllen, sondern auch Innovationsführer in ihrem Sektor werden können“, so Michelle Duerksen, Sustainability Sales Manager bei Schneider Electric. (Bild: Schneider Electric)")
:quality(80)/p7i.vogel.de/wcms/02/ba/02baa569447a740c8090977765087852/0129990653v1.jpeg "Michelle Duerksen (Sustainability Sales Manager Schneider Electric, links oben), Jens Müller (Geschäftsführung Müller und Partner Sachverständige, links unten). Von rechts oben nach unten: Benjamin Zierold (Geschäftsführer Koenig & Bauer), Wolfgang Wiedemann (Director Murrelektronik) und Thomas Droth (Head of Industry Solutions Mitsubishi Electric). (Bild: Schneider Electric, Laura Boysen/Müller und Partner Sachverständige, Murrelektronik, König & Bauer, Mitsubishi Electric)")
:quality(80)/p7i.vogel.de/wcms/1f/4e/1f4eb9b8068cd0205a3d8975c49e5e8a/0129856192v3.jpeg "\"Der Engpass ist selten die KI selbst, sondern die Frage, wo Intelligenz sinnvoll in bestehende Prozesse integriert werden kann. Wenn KI nur ‚neben' der Maschine arbeitet, bleibt der Nutzen begrenzt\", sagt Dr. Andreas de Jonge, CEO der de Jonge GmbH. (Bild: de Jonge)")
:quality(80)/p7i.vogel.de/wcms/a3/33/a333764b4ca8a67714ca943491d22b96/0129603431v2.jpeg "Die Textilsortieranlage ist in mehrere Bereiche unterteilt und kombiniert automatische sowie
manuelle Stationen, die von Anlagenbedienern und Mitarbeitern betrieben werden, um die
verschiedenen Sortiervorgänge durchzuführen. (Bild: Rex Automatisierungstechnik GmbH)")
:quality(80)/p7i.vogel.de/wcms/fc/bc/fcbceb9e0bd807070943d6beca78bcd3/0120952935v1-796x448v1.jpeg "(Bild: Sawyer0 - stock.adobe.com / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/40/c5/40c53e7d83af9f295950718a48433e4c/0130029913v1.jpeg "Simulation in Robot Studio (oben links) im Vergleich zum neuen Robot Studio HyperReality von ABB Robotics. (Bild: ABB Robotics)")
:quality(80)/p7i.vogel.de/wcms/ef/f9/eff9ea81a0b4ea3e3b23d96f8ba2980b/aufmacher-20eplan-20next-2072-20dpiv1.jpeg "Mit Eplan Next26 feiert in diesem Jahr ein völlig neues Eventformat Premiere: Ein globales Festival für Visionäre, Entscheider und Anwender aus Industrie und Engineering. (Bild: Eplan)")
:quality(80)/p7i.vogel.de/wcms/87/53/875386975f87ee30b850a87ffcd077e1/0129672522v2.jpeg "Kurt Robert Hippler (Bild: Harting)")
:quality(80)/p7i.vogel.de/wcms/54/19/5419d409f0759646d28b0acf91ecc1ac/2026-010-compressorless-gas-turbine-3024x1699v1.jpeg "Die kompressorlose Gasturbine des KIT-Teams brennt fast eine Minute länger als die der NASA. (Bild: oachim Grune, KIT)")
:quality(80)/p7i.vogel.de/wcms/23/2f/232f636f6248666396bcd56245c7c45a/0129576591v2.jpeg "Die Gehäusesysteme von Rose werden auf Wunsch kundenspezifisch konfektioniert.
(Bild: Rose Systemtechnik GmbH)")
:quality(80)/p7i.vogel.de/wcms/3b/4c/3b4c732b4e65495ba8b971a3883e48c2/0129554818v2.jpeg "Das Mehrkanalmess-, -regel- und -registriergerät Aquis Touch S stellt sicher, dass die Qualitätsparameter der Kühlmedien stimmen. (Bild: Jumo)")
:quality(80)/p7i.vogel.de/wcms/c3/5a/c35a620c07f4196372cd5dbd3ecbbf11/0129610882v3.jpeg "Temperaturmessgeräte sind essenziell, um industrielle Prozesse zu überwachen und damit eine hohe Produktqualität sicherzustellen. (Bild: Micro-Epsilon)")
:quality(80)/p7i.vogel.de/wcms/ac/04/ac04588e2eaac4d8ebe0fa77c8239610/0129578734v2.jpeg "Mit der dreiachsigen Vibrationsmessung (X-. Y- und Z-Achse) und Temperaturerfassung liefert der Condition-Monitoring-Sensor CMSVT38 detaillierte Zustandsinformationen, die helfen, frühzeitig Maschinenschäden zu erkennen. (Bild: Kübler)")
:quality(80)/p7i.vogel.de/wcms/df/44/df44fe5dac9fae6033e8252585dab73d/0129353129v2.jpeg "Einiges Entwicklungs-Know-how von Bruno Oberli und seinem Team floss in die Entwicklung der Massagebürste, die Herstellung der Borsten und deren Anordnung. Die Bürsten werden in verschiedenen Varianten mit unterschiedlichen Bürstenstärken angeboten. (Bild: Aglaja)")
:quality(80)/p7i.vogel.de/wcms/e9/d8/e9d82a7e14262eed57f02a3b9c14bf19/gemini-generated-image-66l5ka66l5ka66l5-2730x1536v1.png "Dr. Volker Lindenau (Foto) wurde im Rahmen der turnusmäßigen Neuwahlen bereits Ende November 2025 zum neuen Vorsitzenden des Fachbereichs Elektrische Antriebe gewählt. Er folgte auf Dr. Jörg Hassmann (Siemens). (Bild: ABB / KI-Bearbeitung: Gemini)")
:quality(80)/p7i.vogel.de/wcms/54/a3/54a31cb0eab811647e5ef6a59ff95ec0/0129146947v2.jpeg "Die Verbindung zwischen Zahnkranz und Ofenmantel erfolgt über Blattfedern, die eine flexible und zugleich robuste Kopplung ermöglichen. (Bild: SEW)")
:quality(80)/p7i.vogel.de/wcms/de/14/de14ebe1ef8693418fefbebf491f4390/0130117778v1.jpeg "Roboter könnten das Gesundheitssystem entlasten, doch es gibt noch immer zahlreiche Vorbehalte. (Bild: © Anna Syvak - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/56/b6/56b68ad09d347f60cbd426444828a04c/csm--dscf3850-bearb-auto-farbe-korrektur-copyaschmitz-ffdfbb4a27-1920x1080v1.webp "Dank Sprachmodell findet der Roboter verlorene Gegenstände - künftig soll ihm das sogar gelingen, wenn er hinter Türen oder in Schubladen suchen muss. (Bild: Andreas Schmitz/TUM)")
:quality(80)/p7i.vogel.de/wcms/53/b0/53b0e896cf493f23377bd74ba0c461b6/0129893471v1.jpeg "Mit Dynamic Safety wird eine effiziente Kooperation zwischen Menschen und Robotern Wirklichkeit. (Bild: Gorodenkoff@shutterstock.com)")
:quality(80)/p7i.vogel.de/wcms/54/70/5470de42160a007f4f1cfb7054bd4e08/0129964352v1.jpeg "Die Herstellung von Hardwarekomponenten für humanoide Roboter bietet viel Marktpotenzial. (Bild: Fraunhofer IPA)")
:quality(80)/p7i.vogel.de/wcms/40/3f/403f671de74a841bb333531ce4eec290/35dsc-5297-6048x3402v1.jpeg "Ein beliebtes Format sind die Live-Zone-Vorträge auf der Schraubtec. Markus Fischer von SCS Concept wird auch in Stuttgart wieder mit dabei sein. (Bild: Camilo Amaya)")
:quality(80)/p7i.vogel.de/wcms/17/8f/178fe231831c8d06822596b618590fac/0130073090v1.jpeg "In einem Marktumfeld, in dem Anpassungsfähigkeit, Geschwindigkeit und Transparenz zu entscheidenden Erfolgsfaktoren werden, bedeutet Untätigkeit zwangsläufig den Verlust der Wettbewerbsfähigkeit. (Bild: © ImageFlow - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/95/fc/95fcfbbed81634bdccedf6b167b3079b/0127818303v1-789x444v1.jpeg "Die deutsche Wirtschaft kommt einer Bitkom-Studie zufolge bei der Entwicklung von Digital-Innovationen voran, wenngleich langsam. (Bild: Pixabay)")
:quality(80)/p7i.vogel.de/wcms/12/39/12394406613810eb7023b18a652d159c/0130119218v1.jpeg "Wenn Frauen den Job wechseln wollen, sind häufig schlechte Führungskräfte oder Stress ein Grund. (Bild: © kamiphotos - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/1e/23/1e2304de29986b6706547c6c997e6ace/business-9804075-1280-20-281-29-1280x720v1.jpeg "Im vierten Quartal 2025 gab es bundesweit 1,26 Millionen offene Stellen – 224.100 oder rund 22 Prozent mehr als im Vorquartal. (Bild: Pixabay)")
:quality(80)/p7i.vogel.de/wcms/e1/a8/e1a8091bc5c554d3477c4c62f0e5588f/0129551022v2.jpeg "In vielen Unternehmen sind Führungskräfte seit Jahren extrem gefordert. Dies kann zum Absinken des Energielevels der Führungskräfte führen. (Bild: © Berit Kessler - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/4f/0f/4f0fb6d0036a7e5b78f6c13b2cc8544b/0129468837v1.jpeg "Ein Jobwechsel kommt für viele Beschäftigte in der aktuellen wirtschaftlichen Lage nicht in Frage. (Bild: © contrastwerkstatt - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/58/63/586379bda19d8f06e6015cecb41a4967/kampagnenbild-1947x1095v1.png "(Bild: ANSYS Germany GmbH )")
:quality(80)/p7i.vogel.de/wcms/d1/12/d112dfa6e7df4c7af715a4833483f659/0126977441v1.jpeg "DIN RAIL SMART PROTECTION: RACPRO1 E-FUSE MODULE (Bild: RECOM Power GmbH)")
:quality(80)/images.vogel.de/vogelonline/bdb/1651700/1651739/original.jpg "Apps helfen nicht nur im Alltag – auch auf der Arbeit können sie vieles erleichtern. (©mast3r/stock.adobe.com)")
Kleine Losgrößen im Griff Flexible Steuerungsarchitekturen für Automatisierungssysteme
Abstraktionsschichten erübrigen manuelles Konfigurieren. So bei einer Plug&Produce-Zellensteuerung, die Geräte mit verschiedensten Schnittstellen und unterschiedlichsten Kommunikationsprotokollen integriert.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/114400/114404/65.jpg "SABLogo-special cables.jpg ()")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/76800/76895/65.jpg "FAULHABER_120mm.jpg ()")
Auf unterster Ebene wird die Kommunikation abstrahiert, d.h. es wird per Schnittstelle eine einheitliche − vom verwendeten Kommunikationsprotokoll unabhängige − Kommunikation mit den angeschlossenen Geräten ermöglicht. Die spezifischen Geräteschnittstellen der nächsthöheren Ebene sind soweit zu abstrahieren, dass die Steuerung auf Geräte mit gleicher Funktionalität einheitlich zugreifen kann.
Steuerungen, die Kernkomponenten moderner Automatisierungs- und Fertigungsanlagen, entscheiden wesentlich über den wirtschaftlichen Erfolg oder Misserfolg eines Anlagenherstellers. Die Integration immer komplexer werdender Sensorik und Aktorik in Automatisierungssystemen stellt neue Anforderungen an die Leistungsfähigkeit und Flexibilität der verwendeten Steuerung. Eine Entscheidung für den Einsatz einer Steuerungsarchitektur wirkt sich daher langfristig auf die Unternehmensentwicklung aus und ist unter strategischen Gesichtspunkten zu treffen. Weil die Anzahl von Anbietern konkurrierender Steuerungskomponenten unüberschaubar ist, ist es jedoch schwierig, den Überblick zu behalten. Hinzu kommen der rasante Fortschritt bei Hard- und Software und zunehmende Synergien mit der PC-Welt. Steuerungsaufgaben, die vor wenigen Jahren noch spezielle Hardware erforderten, lassen sich heute quasi nebenher auf einem Standard-PC ausführen. Zeitkritische Kommunikation, die früher über dedizierte Feldbusse lief, lässt sich heute schneller mit auf Ethernet basierenden Protokollen und Standard-Hardware ausführen.
Die Herausforderung für den Maschinenbauer
Viele Unternehmen stehen deshalb vor der Herausforderung, eine geeignete Steuerungsarchitektur für ihre Produkte zu konzipieren, die neben der eigentlichen Steuerungsaufgabe folgende Anforderungen erfüllt:
- Flexibilität: alle gegenwärtigen und zukünftigen Steuerungsaufgaben können gelöst werden.
- Geringer Entwicklungsaufwand: der Steuerungsentwickler kann sich um die eigentliche Steuerungsaufgabe kümmern und benötigt nur wenig Entwicklungszeit für die Implementierung und Konfiguration von Standardkomponenten wie z.B. Treibern für Kommunikationsprotokolle.
- Offenheit: die Einbindung von externen Modulen, wie z.B. vorhandenen Datenbanken oder proprietären Algorithmen ist problemlos und mit wenig Aufwand möglich.
- Zukunftssicherheit: zukünftige Entwicklungen wie z.B. schnellere Prozessoren oder neue Kommunikationsprotokolle können genutzt werden.
- Versorgungssicherheit: benötigte Komponenten werden von mehreren alternativen Lieferanten angeboten.
Eine Lösung, die alle genannten Anforderungen gleichermaßen vollständig erfüllt, existiert in der Praxis leider nicht. Deshalb muss jedes Unternehmen individuell entscheiden, welche Prioritäten gesetzt werden sollen. Allerdings gilt, dass die Einhaltung der Best-Practise-Prinzipien »Modularisierung«, »Dezentralisierung« und »Abstraktion« die Steuerungskomplexität stark reduziert und die resultierenden Steuerungsarchitekturen die oben genannten Anforderungen bestmöglich erfüllen. Deshalb sollen diese Prinzipien im Folgenden erläutert und anhand von Realisierungen am Fraunhofer IPA veranschaulicht werden.
Modularisierung nach dem Prinzip Best-Practise
Unter Modularisierung versteht man das Aufteilen eines Gesamtsystems in Teilsysteme, die Module. Diese haben eine Schnittstelle und kapseln ausgewählte Funktionalitäten. Eine gute Modularisierung erzeugt Teilsysteme mit schlanken Schnittstellen. Die Teilsysteme haben klar definierte Aufgaben, zu deren Erfüllung nur geringe Interaktion mit anderen Teilsystemen erforderlich ist. Die Kommunikation zwischen den Teilsystemen ist daher auf ein Minimum reduziert. Auf eine Steuerungsarchitektur übertragen bedeutet dieses Prinzip, dass unterschiedliche Steuerungsaufgaben auf verschiedene über Schnittstellen kommunizierende, ansonsten gekapselte Steuerungsprogramme aufgeteilt werden.
Vorteile der Modularisierung sind eine reduzierte Komplexität des Gesamtsystems, ein gegenüber monolithischen Steuerungsarchitekturen reduzierter Entwicklungsaufwand durch Wieder- und Mehrfachverwendung von eigenen Modulen sowie durch die einfache Integration externer Module an standardisierten Schnittstellen.
Das Best-Practise-Prinzip Dezentralisierung
Dezentralisierung ist die konsequente Fortführung von Modularisierung. Unter Dezentralisierung versteht man die Verteilung einer modularen Steuerungsarchitektur auf separate Hardwareplattformen. Deshalb stellt eine dezentrale Steuerungsarchitektur weit höhere Anforderungen an die Schnittstellendefinition, da nicht nur die Repräsentation der Informationen einheitlich festgelegt werden muss, sondern auch deren Kommunikation.
Der Hauptvorteil einer dezentralen Steuerungsarchitektur ist der einfache Austausch von Komponenten, ohne Änderungen an den jeweiligen Steuerungsprogrammen vornehmen zu müssen. Ein weiterer Vorteil ist eine höhere Gesamtanlagenverfügbarkeit, da der Ausfall einer Steuerung nicht zwangsläufig zum Ausfall des Gesamtsystems führt.
Die Best-Practise-Prinzip Abstraktion
Abstraktion ist entscheidend zur erfolgreichen Realisierung von modularen Steuerungsarchitekturen. Unter Abstraktion wird das Weglassen unwesentlicher Einzelheiten mit dem Ziel einer allgemeinen Darstellung verstanden. Abstraktion wird angewendet bei der Definition von Schnittstellen modularer Steuerungsarchitekturen. Schnittstellen sollten so allgemein wie möglich definiert werden, um die Anzahl unterschiedlicher Schnittstellen zu reduzieren und dadurch die Möglichkeit zur Wiederverwendbarkeit von Modulen zu erhöhen. Je nach Abstraktionsniveau einer Schnittstelle kann z.B. erreicht werden, dass Daten zwischen verschiedenen Hardwareplattformen ausgetauscht werden können, Steuerungsprogramme unabhängig von den verwendeten Kommunikationsprotokollen verwendet werden können oder Aktoren unabhängig von der Art der Betätigung angesteuert werden können.
Die Kombination der Best-Practise-Prinzipien Modularisierung, Dezentralisierung und Abstraktion ergibt flexible, offene Steuerungsarchitekturen zur Realisierung konkreter Steuerungsaufgaben mit geringem Entwicklungsaufwand. Die zwei im Folgenden beschriebenen, am Fraunhofer IPA realisierten Steuerungsarchitekturen für Automatisierungslösungen illustrieren diese Vorteile.
Verlegewerkzeuge bei Robotern steuern
Ein Beispiel aus der Praxis: Steuerung eines Roboter-Verlegewerkzeugs für biegeschlaffe Dichtungsprofile. Die verwendete Architektur eignet sich zum Steuern einer Robotersapplikation, bei der es gilt, biegeschlaffe selbstklebende Dichtungsprofile mit definierter Spannung zu verlegen. Die Anlage besteht aus einem Roboter mit angeflanschtem Verlegewerkzeug. Das Verlegewerkzeug selbst enthält diverse Aktorik und Sensorik zur Prozessregelung und -kontrolle. Das Dichtungsprofil wird über eine Andrückrolle appliziert.
Zur Modularisierung: Die Steuerungsaufgabe wurde unterteilt in zwei Module, in eine Bewegungs-Steuerung zur Führung des Verlegewerkzeugs und in eine Prozess-Steuerung zum Regeln des eigentlichen Verlegeprozesses. Aufgabe der Bewegungs-Steuerung ist es, dafür zu sorgen, dass das Dichtungsprofil an der richtigen Stelle verlegt wird. Aufgabe der Prozess-Steuerung ist es, die Aktorik des Verlegewerkzeugs so zu regeln, dass das biegeschlaffe Dichtungsprofil mit definierter Spannung verlegt wird. Die Verlegegeschwindigkeit selbst wird direkt an der Andrückrolle über einen Inkrementaldrehgeber aufgenommen und bildet in Kombination mit einer Tänzerregelung zur Kompensation von Spannungen im Dichtungsprofil die Geschwindigkeitsvorgabe für die Prozess-Steuerung.
Zur Dezentralisierung: Die Bewegungs-Steuerung ist auf der Robotersteuerung realisiert, die Prozess-Steuerung ist in die drei Motorcontroller des Werkzeugs integriert. Zum Übertragen der zeitkritischen Soll- und Ist-Werte des Regelkreises zwischen den Controllern wurde deren vorhandene CAN-Schnittstelle genutzt. Die Schnittstelle zwischen Bewegungs- und Prozess-Steuerung ist in Form weniger digitaler und analoger Signale realisiert.
Die Vorteile der gewählten Lösung
Durch die beschriebene Aufteilung der Steuerungsaufgabe im Zusammenhang mit der ins Werkzeug integrierten Generierung der Geschwindigkeitsvorgabe ist die Schnittstelle zwischen Bewegungs- und Prozess-Steuerung sehr schlank. Sie besteht aus wenigen Steuersignalen sowie Parametervorgaben. Der zeitkritische Regelkreis zur spannungsfreien Verlegung des Dichtungsprofils befindet sich innerhalb der Prozess-Steuerung. Deshalb müssen keine zeitkritischen Informationen über die Schnittstelle übermittelt werden, wie es z.B. der Fall gewesen wäre, wenn die Geschwindigkeitsvorgabe von der Bewegungs-Steuerung generiert worden wäre.
Die Aufteilung der Bewegungs- und Prozess-Steuerung auf unterschiedliche Hardwareplattformen ermöglicht es, das Verlegewerkzeug ohne Änderungen an der Prozess-Steuerung und Inbetriebnahme aufwändiger Echtzeit-Kommunikation mit Robotern verschiedenster Hersteller zu nutzen.
Durch Anwendung der Best-Practise-Prinzipien Modularisierung und Dezentralisierung wurde somit eine Roboterapplikation realisiert, die trotz komplexer Prozessregelung schlanke Schnittstellen aufweist und deshalb flexibel eingesetzt werden kann.
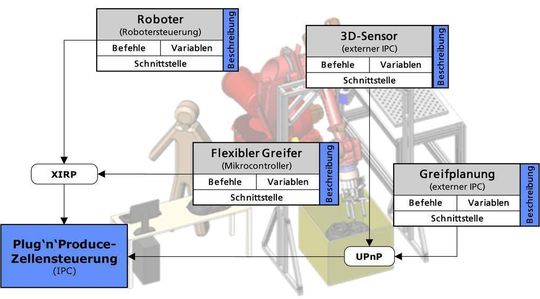
Ein weiteres Beispiel beschreibt die Plug&Produce-Steuerungsarchitektur für Roboterzellen. Dabei hat die Steuerungsarchitektur der Roboterzelle zum Ziel, die Zelle einfach an neue Aufgaben anpassen zu können. So soll die Architektur den wirtschaftlichen Einsatz von Robotern auch bei kleinen Losgrößen ermöglichen. Deshalb soll die Steuerungsarchitektur folgende Anforderungen erfüllen:
- Integration neuer Werkzeuge ohne manuellen Konfigurationsaufwand. Die Werkzeuge selbst haben unterschiedlichste, nicht standardisierte Schnittstellen und werden über verschiedene Kommunikationsprotokolle angesprochen.
- Einfache Ablaufprogrammierung durch Verwendung atomarer, von den Schnittstellen einzelner Geräte unabhängiger Prozesse. Die Programmierung reduziert sich dadurch zu einer Parametrisierung. Für den definierten Ablauf muss ein ausführbares Programm automatisch generiert werden.
Modularisierung und Dezentralisierung
Nur von einer modularen und dezentralen Steuerungsarchitektur lassen sich die genannten Anforderungen erfüllen. Alle Geräte (Roboter, Werkzeuge) der Roboterzelle haben eine eigene dezentrale und somit modulare Steuerung und stellen eine definierte Schnittstelle zur Verfügung. Die Ablaufsteuerung läuft auf einer separaten Zellensteuerung mit entsprechenden Schnittstellen zur Kommunikation mit den Geräten.
Das Fazit: Im Rahmen verschiedener Projekte wurde am Fraunhofer IPA die Erfahrung gesammelt, dass bei der Konzeption von Steuerungsarchitekturen die Beachtung der Best-Practise-Prinzipien Modularisierung, Dezentralisierung und Abstraktion zu klar strukturierten, flexiblen und zukunftssicheren Steuerungsarchitekturen führt. Diese ermöglichen Herstellern von Automatisierungslösungen die Realisierung der eigentlichen Steuerungsaufgaben mit geringem Entwicklungsaufwand. Das Fraunhofer IPA unterstützt − wie an zwei Beispielen gezeigt − Unternehmen bei der Konzeption und Realisierung von modularen, dezentralen Steuerungen für Automatisierungssysteme. Weitere Informationen zu diesem Thema erhalten Sie über InfoClick oder bei den Autoren.
Mehr machbar mit Modulen
Die modulare, dezentrale Steuerungsarchitektur einer Roboterzelle ermöglicht das einfache Anpassen an geänderte Aufgaben, indem man einfach Geräte hinzufügt oder entfernt. Das in der Zellensteuerung erreichte Abstraktionsniveau ermöglicht es, dem Benutzer eine Möglichkeit zur Ablaufprogrammierung zur Verfügung zu stellen, ohne dass auf spezifische Geräteschnittstellen und Kommunikationsprotokolle eingegangen werden muss. Die vom Benutzer definierte Ablaufbeschreibung lässt sich durch Hinzufügen abstrahierter Details automatisch in ein ausführbares Programm umsetzen.
Im Rahmen verschiedener Projekte sammelte das Fraunhofer IPA Erfahrungen, dass bei der Konzeption von Steuerungsarchitekturen das Beachten der Best-Practise-Prinzipien-Modularisierung, der Dezentralisierung und der Abstraktion zu klar strukturierten, flexiblen und zukunftssicheren Steuerungsarchitekturen führt. Dies ermöglicht Herstellern von Automatisierungslösungen die Realisierung der eigentlichen Steuerungsaufgaben mit geringem Entwicklungsaufwand.
Prof. Dr.-Ing. Alexander Verl, Institutsleiter Institut für Produktionstechnik und Automatisierung (IPA), Stuttgart, Martin Naumann, Mitarbeiter Fraunhofer-Institut für Produktionstechnik und Automatisierung (IPA), Stuttgart
(ID:257508)
:quality(80)/p7i.vogel.de/wcms/78/28/782884c9ccee70d111762323168faa02/0126654056v2.jpeg "Messtechnik muss Messdaten vorverarbeiten, überwachen, außergewöhnliche Ereignisse erkennen und dies sofort in Prozessentscheidungen einfließen lassen. Dazu braucht es modulare, skalierbare Systeme. (Bild: Delphin Technology)")
:quality(80)/p7i.vogel.de/wcms/62/13/62135ea2e9781f8708ec0c0c79c57399/0129302904v2.jpeg "Die Retrofit-Maschine VSC 400 DDS von EMAG bei EWS Weigele mit Tool-Shuttle zur externen Werkzeugvorbereitung – Basis für prozesssichere Hartbearbeitung von Zahnrädern. (Bild: Emag Systems)")