:quality(80)/p7i.vogel.de/wcms/2b/d4/2bd40168bce48c337b86a451b11fd865/hqdipr202606197409-02-1000x563v1.jpeg "Sinumerik One bildet die technologische Basis für das Retrofit von Walzenschleifmaschinen und ermöglicht eine moderne, leistungsfähige CNC-Steuerung. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/61/71/617123e3846b0079e580895c5bc37d40/2-995x560v1.png "Das Forschungsteam an der TU München misst und regelt die Sehnenkräfte an dem Roboter. Das Ziel des Forschungsprojekts sind neuartige Regelungskonzepte. (Bild: TU München)")
:quality(80)/p7i.vogel.de/wcms/d5/09/d5091cd9a582aa0f780740ec4faac973/0130381601v2.jpeg "Die Besucher freuten sich vor allem über das vielfältige Programm. (Bild: Stefan Bausewein/VCG)")
:quality(80)/p7i.vogel.de/wcms/b6/f5/b6f57042111d87f229188016760aa9be/0130112613v2.jpeg "„Den Teilnehmern werden auch Strategien vorgestellt, wie sie nicht nur gesetzliche Vorgaben erfüllen, sondern auch Innovationsführer in ihrem Sektor werden können“, so Michelle Duerksen, Sustainability Sales Manager bei Schneider Electric. (Bild: Schneider Electric)")
:quality(80)/p7i.vogel.de/wcms/42/96/42969a1445c4620ef0cbae7ec8191391/0132052516v2.jpeg "Wenn es um das Wärmemanagement geht, sollten Hardware-Entwickler und Konstrukteure zusammenarbeiten. (Bild: ROSSandHELEN photoqraphers)")
:quality(80)/p7i.vogel.de/wcms/48/99/489900c86cc2e60b32a40ff40c029351/newsimage425045-3072x1729v1.jpeg "Experimente mit Batterien: Mithilfe digitaler Zwillinge soll sich mehr Resilienz für Batteriegroßspeicher erreichen lassen.
(Bild: Hochschule München)")
:quality(80)/p7i.vogel.de/wcms/16/00/1600883e04215e4e3863e4a941e364c0/newsimage424941-2000x1124v1.jpeg "Mit Kassandra tauchen Teams in eine Thriller‑Story ein, lösen unter Zeitdruck KI‑Challenges. (Bild: Fraunhofer FIT)")
:quality(80)/p7i.vogel.de/wcms/cc/e3/cce35deb9b98be9cb9f78e66e7b0a661/newsimage425331-2960x1666v1.jpeg "Mit dem Lightweaver-Mikroskop lässt sich ein zehnmal größeres Bildfeld erzielen als bisher möglich war. (Bild: Universität Bielefeld/Jana Haver)")
:quality(80)/p7i.vogel.de/wcms/0a/c6/0ac6b2ca4dc4f2d7c6f6e95037de2d5d/newsimage425297-2250x1265v1.png "Das Kühlsystem eines Quantencomputers hält die Quantenchips bei Temperaturen nahe dem absoluten Nullpunkt. Erst unter diesen Bedingungen können sie ihre besonderen Quanteneigenschaften entfalten (künstlerische Darstellung). (Bild: B. Schröder/HZDR)")
:quality(80)/p7i.vogel.de/wcms/db/3e/db3e3f1ae0736c5566fbc42e4391769b/snap-1997x1123v1.jpeg "Mit Tesys Deca Snap In bietet Schneider Electric eine Lösung für das Motormanagement mit patentiertem Snap-In-Design. (Bild: Schneider Electric)")
:quality(80)/p7i.vogel.de/wcms/b6/a9/b6a9b574a3fd095715f2d5fa6e43a3af/deltalogic-grob-bearbeitungszentrum-8192x4608v1.jpeg "Das zweispindlige Bearbeitungszentrum G520 von Grob ermöglicht Kunden unter anderen aus der Automobilbranche die parallele Zerspanung von zwei Werkstücken. (Bild: Grob)")
:quality(80)/p7i.vogel.de/wcms/dd/fc/ddfcc0b79e351e582e478fb6c0f0c788/hms-marktanteilenetzwerke-2026-3000x1687v1.jpeg "Die Analyse 2026 zeigt, dass Industrial Ethernet inzwischen 79 Prozent aller neuen Knoten ausmacht und damit gegenüber 76 Prozent im Jahr 2025 weiter zugelegt hat. Die drei führenden Ethernet-Protokolle konnten ihre Position erneut ausbauen und repräsentieren zusammen inzwischen rund drei Viertel des kabelgebundenen Protokollmarktes. (Bild: HMS Networks)")
:quality(80)/p7i.vogel.de/wcms/d3/5a/d35a77febaf6b1f355858286770b66da/aufmacher-lapp-mg-0891-2048x1151v1.jpeg "Lapp demonstriert mit einem Automatisierungsmodell, wie Sensoren, Aktoren, Leitungen und Netzwerkkomponenten Daten zuverlässig in die Cloud übertragen. (Bild: Lapp)")
:quality(80)/p7i.vogel.de/wcms/19/dd/19dd5f52d6bad28d399626eadcc8396c/0132353833-1000x563v1.jpeg "Im durchsichtigen, 3D-gedruckten Bauteil, dreht sich der schwebende „Schwimmer“ (rot-blau markiert) an der Wasseroberfläche. (Bild: Cheng Zeng / Sinano)")
:quality(80)/p7i.vogel.de/wcms/32/3d/323d0774d5c3e5d671c16323c2012c1d/kollmorgen-image-201-3872x2179v1.jpeg "In Gefahrenzonen sind explosive Gase oder brennbare Stäube nicht dauerhaft vorhanden; unter anormalen Betriebsbedingungen oder für begrenzte Zeiträume können sie jedoch auftreten. (Bild: Kollmorgen)")
:quality(80)/p7i.vogel.de/wcms/25/67/2567a762b26115eddacae3a2f3b7d560/inovance-20x-20vascat-203-1600x900v1.jpeg "David Bedford Guaus (re.), Country Manager bei Inovance Technology Spain und Technischer Direktor für Inovance in den Regionen Europa und Nordamerika, sagt: „Die gemeinsame Suche nach einer Lösung zur Integration unserer Antriebe in das System hat unsere Zusammenarbeit mit Vascat weiter verbessert und wir hoffen sehr, in Zukunft wieder zusammenzuarbeiten.“ (Bild: Inovance)")
:quality(80)/p7i.vogel.de/wcms/b9/00/b900518354ac558a14bc60599284bff0/gemini-generated-image-physical-20ai-2728x1536v1.png "Wahrnehmen, entscheiden, handeln: Bei Physical AI verschmelzen Aktorik, 3D-Sensorik und Edge-Computing zu einem geschlossenen System. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/09/69/09695c87c8d85c087117e1f8e784562a/pm3626-1-2551x1435v1.jpeg "Damit Bootsrümpfe sauber bleiben: Der Unterwasserroboter KeelCrab nutzt schmierfreie Polymerlager von igus für einen wartungsarmen und korrosionsfreien Einsatz im Salzwasser. (Bild: Igus SE & Co. KG / KI-unterstützt)")
:quality(80)/p7i.vogel.de/wcms/87/0c/870ca78978ff2a03f4fd558dc978dbeb/newsimage425258-3000x1687v1.jpeg "Studenten vom Campus Gütersloh haben einen Pancake-Roboter gebaut, der selbstgezeichnete Formen zu individuellen, farbigen Pancakes drucken kann. (Bild: P. Pollmeier/HSBI)")
:quality(80)/p7i.vogel.de/wcms/70/6f/706f580af54fe933872e86f3d3f0386e/hm26-13-000042-1600x900v1.png "Der Robotics Award 2026 wurde an das Startup Good Bytz vergeben. Die prämierte Lösung ist ein Küchensystem, in dem leichte, kompakte Industrieroboter zum Einsatz kommen. (Bild: Deutsch Messe AG)")
:quality(80)/p7i.vogel.de/wcms/b6/1e/b61ee9620cff0c1e614d908d5036220b/wertsch-c3-b6pfung-kigeneriert-gemini-1018x573v1.jpeg "Digitale Technologien ermöglichen die Erfassung und Auswertung von Daten entlang des gesamten Produktlebenszyklus und gelten als Schlüssel für zirkuläre Wertschöpfung. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/e7/3e/e73e7453e41c35c939d0b3ca17c4eb81/factory-20x-panelteilnehmer-20zum-20thema-20industrie-20im-20wandel-20-e2-80-93-20ohne-20daten--c3-96kosysteme-20keine-20-28ki--29-20zukunft-small-3000x1687v1.jpeg "Panelteilnehmer zum Thema: „Industrie im Wandel – ohne Daten-Ökosysteme keine (KI-) Zukunft?“
Von links nach rechts: Rainer Brehm (SIEMENS), Dr. Stephan Mayer (Trumpf); Prof.Dr. Dipl-Ing Berend Denkena (DMG Mori) Dr. Beate Baron (BMWE), Hagen Heubach (SAP)
(Bild: Factory-x)")
:quality(80)/p7i.vogel.de/wcms/56/7b/567b3d4b554a1dbdcf835918350c021a/symbolbild-wahrnehmung-ki-1364x768v1.jpeg "KI-Modelle verarbeiten visuelle Informationen oft fragmentiert – neue Trainingsansätze setzen hier an. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/1e/e9/1ee9d6e483fa9e4f5e07c3a74ef2a3cd/adobestock-795201631--c2-a9-20org-20-e2-80-93-20stock-adobe-com-ki-generiert-8697x4896v1.jpeg "Die Zahl der offenen Stellen in der Elektroindustrie stieg im ersten Halbjahr 2026 deutlich an. (Bild: © ORG – stock.adobe.com / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/93/1a/931a35db6d90693283049b840dcacd2b/st-hannover-149-6048x3400v1.jpeg "Der fachliche Austausch zwischen Besucher und Aussteller ist das, was die Schraubtec ausmacht. (Bild: PHOTOVISION-DH GmbH)")
:quality(80)/p7i.vogel.de/wcms/68/89/6889ce824f7362d1ee31c6114039849d/0131677915v2.jpeg "Nur menschliche Empathie schafft echte Beziehungen. Führungskräfte, die Hoffnung vermitteln und Vertrauen im Alltag leben, verwandeln Risiken automatisierter Entscheidungen in Chancen, die Organisation und Mitarbeitende gleichermaßen stärken. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/58/63/586379bda19d8f06e6015cecb41a4967/kampagnenbild-1947x1095v1.png "(Bild: ANSYS Germany GmbH )")
:quality(80)/p7i.vogel.de/wcms/d1/12/d112dfa6e7df4c7af715a4833483f659/0126977441v1.jpeg "DIN RAIL SMART PROTECTION: RACPRO1 E-FUSE MODULE (Bild: RECOM Power GmbH)")
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/122400/122424/65.jpg "SIKO Logo_300x300px.jpg ()")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/76800/76895/65.jpg "FAULHABER_120mm.jpg ()")
Algorithmus erkennt die Position der Kugel

Einer Basler A601I-Kamera nimmt mit 60 fps Bilder auf, die das NI Embedded-Vision-System auswertet. Mit Hilfe einer beliebigen Kugel entstand ein Algorithmus, der die Position der Kugel erkennt und deren Koordinaten an das CompactRIO schickt. Dazu werden alle Pixel, die dunkler als ein bestimmter Wert sind, in einem gleich großen Binärbild gesetzt. Um diesen Schritt zu unterstützen, wird die Glasplatte von hinten mit einer Leuchtfolie beleuchtet. Anschließend werden alle Objekte des Binärbildes, die größer oder kleiner als die gesuchte Kugel sind, entfernt und damit Reflexionen auf der Kugel nicht den Mittelpunkt verfälschen, alle Löcher gefüllt. Um fehlerhafte Erkennungen zu minimieren, ist der dann berechnete Massenschwerpunkt nur gültig, wenn genau ein Objekt erkannt wurde. An diesen Algorithmus brauchen – bei fertigem Aufbau — nur noch die Parameter angepasst werden.
Parameter der Bildbearbeitung endgültig anpassen
Nach Fertigstellung der Hardware lassen sich die Parameter der Bildbearbeitung endgültig anpassen und die Kommunikation der Komponenten realisieren. Um Zeitpunkt und Timeout der Übertragung vom Embedded-Vision-System zum CompactRIO genau festlegen zu können und gleichzeitig das Datenvolumen gering zu halten werden die aktuellen Koordinaten der Kugel als TCP/IP-String versendet.
Das Touchpanel sollte später den Kugelverlauf darstellen und den Modus (Kreis, Rechteck, Mitte) vorgeben können. Da diese Kommunikation nicht an exakte Zeitpunkte gebunden ist, wurden dafür Shared Variables eingesetzt, welche auf dem CompactRIO gehostet werden. Im Entwicklungsprozess wurden diese Variablen vom Entwicklungslaptop aus mit dem mitgelieferten Distributed System Manager manipuliert. So musste das Touchpanel erst ganz zum Schluss programmiert werden.
Intelligenz der Applikation liegt auf dem CompactRIO
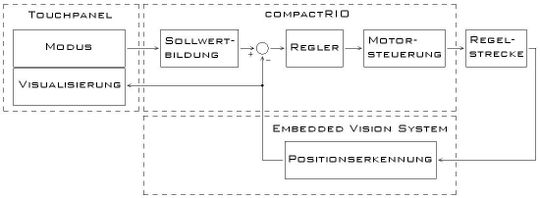
Die Intelligenz der Applikation — also Initialisierung, Sollwertgenerierung und Regler — liegen im Echtzeit-Programm auf dem CompactRIO. Im ersten Entwicklungsschritt wird als Sollwert ein konstanter Wert angenommen (Mitte der Glasplatte) und ein PID-Regler experimentell ausgelegt. Da man direkt vom LabVIEW-Projekt auf dem Entwicklungsrechner aus auf das Frontpanel zugreifen kann, kann man viele Daten der Strecke live verfolgen und im laufenden System Parameter ändern.
(ID:334736)
:quality(80)/p7i.vogel.de/wcms/06/99/069945394b4800015155f844a8249fcf/0127976033v1.jpeg "Die industrielle Automatisierung steht vor einem Paradigmenwechsel: Maschinen, Roboter und mobile Systeme lernen, den Raum zu „verstehen“. (Bild: © ipopba - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/69/46/6946c24861c25a7d75228f63cc6a5253/0131864932v2.jpeg "Auf das IO-Link Gesamtpaket kommt es an. Wenn das Zusammenspiel von Sensoren, leistungsstarken Mastern und einem herstellerunabhängigen Konfigurationstool stimmt, ist eine deutlich gesteigerte Maschinenperformance möglich. (Bild: Baumer)")