:quality(80)/p7i.vogel.de/wcms/2b/d4/2bd40168bce48c337b86a451b11fd865/hqdipr202606197409-02-1000x563v1.jpeg "Sinumerik One bildet die technologische Basis für das Retrofit von Walzenschleifmaschinen und ermöglicht eine moderne, leistungsfähige CNC-Steuerung. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/61/71/617123e3846b0079e580895c5bc37d40/2-995x560v1.png "Das Forschungsteam an der TU München misst und regelt die Sehnenkräfte an dem Roboter. Das Ziel des Forschungsprojekts sind neuartige Regelungskonzepte. (Bild: TU München)")
:quality(80)/p7i.vogel.de/wcms/d5/09/d5091cd9a582aa0f780740ec4faac973/0130381601v2.jpeg "Die Besucher freuten sich vor allem über das vielfältige Programm. (Bild: Stefan Bausewein/VCG)")
:quality(80)/p7i.vogel.de/wcms/b6/f5/b6f57042111d87f229188016760aa9be/0130112613v2.jpeg "„Den Teilnehmern werden auch Strategien vorgestellt, wie sie nicht nur gesetzliche Vorgaben erfüllen, sondern auch Innovationsführer in ihrem Sektor werden können“, so Michelle Duerksen, Sustainability Sales Manager bei Schneider Electric. (Bild: Schneider Electric)")
:quality(80)/p7i.vogel.de/wcms/9e/aa/9eaa7c35ae37442f131b821e70ac300a/aveva-digitales-20ecosystem-8688x4885v1.jpeg "Der KI-Assistent identifiziert die relevanten Daten und liefert eine zusammengefasste Antwort. Bei Bedarf generiert er direkt eine Visualisierung als Dashboard oder Trendansicht, die sich speichern und teilen lässt. (Bild: Aveva)")
:quality(80)/p7i.vogel.de/wcms/0d/7c/0d7c8417e1b596c83da6912c9a6d62f5/adobestock-2012652009--c2-a9-20masque-20--20stock-adobe-com-5460x3072v1.jpeg "Physical AI erfordert aufgrund der engen Verzahnung von Wahrnehmung, Entscheidungslogik und Aktion erweiterte Sicherheitskonzepte. (Bild: Masque - stock.adobe.com Masque - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/7a/12/7a12d7ab565963a22c21ba8b30bf542d/visometry-kunde-wisag-1-3045x1714v1.jpeg "Komplexe Schweißbaugruppen schnell und flexibel kontrolliert: Das AR-Tool Twyn hat die Qualitätsprüfung bei Wisag beschleunigt, vereinfacht und verbessert. (Bild: Visometry)")
:quality(80)/p7i.vogel.de/wcms/7e/9b/7e9bfe170a3b2aa28403d4863dfb191d/adobestock-774959291-ashrafulislam-4779x2688v1.jpeg "Es stellt sich die Frage, wie die schnell wachsende Nachfrage an Energie und neue Technologien mit der bereits vorhandenen Infrastruktur in Einklang gebracht werden können. (Bild: © AshrafulIslam – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/5f/94/5f948e97ebbd674879b4ecde79fb8c12/0132092944v2.jpeg "Der Grundlagentag Wärmemanagement ist ein wesentlicher Bestandteil der Fachkonferenz „Power of Electronics” und hat sich ursprünglich aus den „Cooling Days” entwickelt. (Bild: Stefan Bausewein)")
:quality(80)/p7i.vogel.de/wcms/e2/73/e273e6370fb756735ac06d7ef14bf67c/adobestock-1877003493-puhimec-3521x1983v1.jpeg "Die Elektrifizierung der Industrie wird zur betriebswirtschaftlichen Notwendigkeit. Sie ermöglicht, Energie aus einem System zu beziehen, das sich besser steuern, prognostizieren und optimieren lässt als fossile Alternativen. (Bild: © puhimec – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/69/46/6946c24861c25a7d75228f63cc6a5253/0131864932v2.jpeg "Auf das IO-Link Gesamtpaket kommt es an. Wenn das Zusammenspiel von Sensoren, leistungsstarken Mastern und einem herstellerunabhängigen Konfigurationstool stimmt, ist eine deutlich gesteigerte Maschinenperformance möglich. (Bild: Baumer)")
:quality(80)/p7i.vogel.de/wcms/52/9e/529ed65065534bea9f29da7fe1346482/0131840272v2.jpeg "Jürgen Greger, Experte für industrielle Kommunikation bei Lapp. (Bild: Lapp)")
:quality(80)/p7i.vogel.de/wcms/e7/3e/e73e7453e41c35c939d0b3ca17c4eb81/factory-20x-panelteilnehmer-20zum-20thema-20industrie-20im-20wandel-20-e2-80-93-20ohne-20daten--c3-96kosysteme-20keine-20-28ki--29-20zukunft-small-3000x1687v1.jpeg "Panelteilnehmer zum Thema: „Industrie im Wandel – ohne Daten-Ökosysteme keine (KI-) Zukunft?“
Von links nach rechts: Rainer Brehm (SIEMENS), Dr. Stephan Mayer (Trumpf); Prof.Dr. Dipl-Ing Berend Denkena (DMG Mori) Dr. Beate Baron (BMWE), Hagen Heubach (SAP)
(Bild: Factory-x)")
:quality(80)/p7i.vogel.de/wcms/25/67/2567a762b26115eddacae3a2f3b7d560/inovance-20x-20vascat-203-1600x900v1.jpeg "David Bedford Guaus (re.), Country Manager bei Inovance Technology Spain und Technischer Direktor für Inovance in den Regionen Europa und Nordamerika, sagt: „Die gemeinsame Suche nach einer Lösung zur Integration unserer Antriebe in das System hat unsere Zusammenarbeit mit Vascat weiter verbessert und wir hoffen sehr, in Zukunft wieder zusammenzuarbeiten.“ (Bild: Inovance)")
:quality(80)/p7i.vogel.de/wcms/28/5a/285af4d2fc9c346303d06078a497c9ce/energieeffizienz-20in-20der-20antriebstechnik-1-6456x3634v1.png "Durch den Einsatz moderner Frequenzumrichter lassen sich Lastspitzen reduzieren und Energieanteile aus Bremsvorgängen zurückführen. (Bild: Mitsubishi Electric)")
:quality(80)/p7i.vogel.de/wcms/09/81/0981a58a68530db70d8d67ec13d1c823/adobestock-96039220--c2-a9-203dsculptor-20--20stock-adobe-com-6000x3375v1.jpeg "Anwendungen, die im Weltall eingesetzt werden, stellen höchste Anforderungen an Antriebe. (Bild: © 3dsculptor - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/f5/26/f526510e7228ce55782f4c8b24353645/0132185227v1.jpeg "Sperrmüll hat leider das Charakteristikum, dass er aus verschiedensten Mülltypen besteht. Wie man hier aber deutlich erkennen kann, ist Holz durchaus reich vorhanden. Damit der Rohstoff nicht weiter von Hand aussortiert werden muss, haben Forscher sich endlich etwas überlegt ... (Bild: Wertstoff Giller)")
:quality(80)/p7i.vogel.de/wcms/a1/f0/a1f09295410f5c64d5ae85747172dd2c/1858107-5568x3130v1.jpeg "Das Soft-Hand-Exoskelett unterstützt Menschen, deren Hand gelähmt ist. (Bild: Astrid Eckert / TUM)")
:quality(80)/p7i.vogel.de/wcms/66/62/6662a12a8d0fef0b76e59405e493b9be/softgripping-greifer-20im-20einsatz-2-6000x3373v1.jpeg "Weiche Greiferfinger aus FDA-zugelassenem Silikon gewährleisten das schonende Handling empfindlicher Produkte bei hoher Taktrate. (Bild: Soft Gripping GmbH)")
:quality(80)/p7i.vogel.de/wcms/15/13/15131e408122c4777d914ddd607d28f5/yamaha-20picture-202-754x424v1.jpeg "Die siebte Achse am Cobot steigert die Flexibilität in Produktion und Logistik. (Bild: Yamaha Robotics )")
:quality(80)/p7i.vogel.de/wcms/b6/1e/b61ee9620cff0c1e614d908d5036220b/wertsch-c3-b6pfung-kigeneriert-gemini-1018x573v1.jpeg "Digitale Technologien ermöglichen die Erfassung und Auswertung von Daten entlang des gesamten Produktlebenszyklus und gelten als Schlüssel für zirkuläre Wertschöpfung. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/56/7b/567b3d4b554a1dbdcf835918350c021a/symbolbild-wahrnehmung-ki-1364x768v1.jpeg "KI-Modelle verarbeiten visuelle Informationen oft fragmentiert – neue Trainingsansätze setzen hier an. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/93/1a/931a35db6d90693283049b840dcacd2b/st-hannover-149-6048x3400v1.jpeg "Der fachliche Austausch zwischen Besucher und Aussteller ist das, was die Schraubtec ausmacht. (Bild: PHOTOVISION-DH GmbH)")
:quality(80)/p7i.vogel.de/wcms/68/89/6889ce824f7362d1ee31c6114039849d/0131677915v2.jpeg "Nur menschliche Empathie schafft echte Beziehungen. Führungskräfte, die Hoffnung vermitteln und Vertrauen im Alltag leben, verwandeln Risiken automatisierter Entscheidungen in Chancen, die Organisation und Mitarbeitende gleichermaßen stärken. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/ed/02/ed02ce464ed1a39dcd7a617f55a4ffc1/0131677386v2.jpeg "Durch das Nutzen von KI gewinnen Führungskräfte Zeit für Entwicklungsgespräche, Perspektivenarbeit und persönliche Begleitung. Diese menschliche und persönliche Zuwendung signalisiert Mitarbeitern Wertschätzung und eröffnet Zukunftschancen. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/7d/df/7ddf9467a9acc812e8cc29324c3b080e/0131729703v2.jpeg "Zu viele verschiedene Varianten machen das Handling unübersichtlich. Denn ein geändertes Bauteil betrifft nicht nur eine Stückliste, sondern zieht Anpassungen in Prüfplänen, Dokumentation, Parametrierung und Ersatzteillogik nach sich. (Bild: © Radoman Durkovic - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/58/63/586379bda19d8f06e6015cecb41a4967/kampagnenbild-1947x1095v1.png "(Bild: ANSYS Germany GmbH )")
:quality(80)/p7i.vogel.de/wcms/d1/12/d112dfa6e7df4c7af715a4833483f659/0126977441v1.jpeg "DIN RAIL SMART PROTECTION: RACPRO1 E-FUSE MODULE (Bild: RECOM Power GmbH)")
Robotik Elektrohydraulische Gelenke ermöglichen springende Spinnenroboter
Ein Roboter, der sich um das Zehnfache seiner Höhe hochkatapultieren kann – das hat ein Team von Forschern des Max-Planck-Instituts mit von Spinnenbeinen inspirierten Gelenken realisiert.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/76800/76895/65.jpg "FAULHABER_120mm.jpg ()")
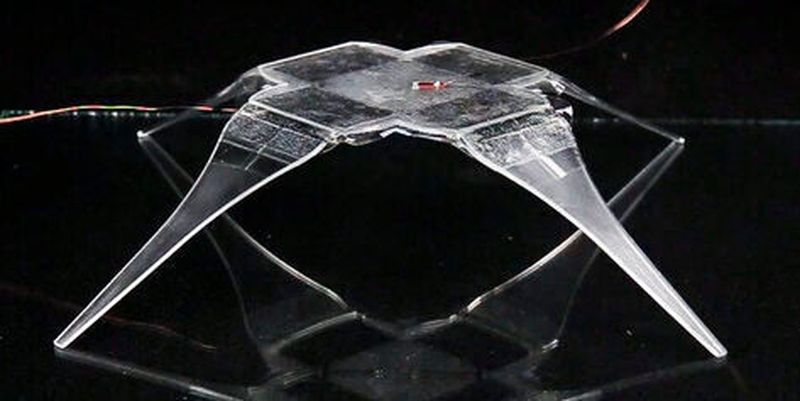
Ein Forscherteam hat in einem Gelenkroboter ein Spinnengelenk nachgebildet, das ohne Komponenten und Verbindungsstücke auskommt, die den Roboter beschweren oder unbeweglich machen könnten. Das ist das Ergebnis einer Forschungsarbeit von Wissenschaftlern des Max-Planck-Instituts für Intelligente Systeme und der University of Colorado Boulder.
Die einfachen Gelenkstrukturen sind in der Lage, den filigranen Roboter um das Zehnfache seiner Höhe hochzukatapultieren. Die hohe Sprungkraft wird möglich durch sogenannte von Spinnen inspirierte elektrohydraulische Soft-Actuated-Joints – kurz SES-Gelenke.
Greifhand aus SES-Gelenken
Die Gelenke setzen die Forscher in vielen verschiedenen Konfigurationen ein. In ihrer Arbeit stellen die Wissenschaftler zunächst ein bidirektionales Gelenk vor, gehen dann über zu einer mehrteiligen Gliedmaße und zeigen am Ende, dass sie mit den Gelenken eine komplette Greifhand mit drei Fingern bauen können. Die Roboterhand kann zerbrechliche Gegenstände aufheben und bewegen, ohne dabei etwas kaputt zu machen.
Die Forscher entwickelten ihre SES-Gelenke auf Basis der Hasel-Technologie, die das Team vor einigen Jahren zum Bau künstlicher Muskeln erfunden hat. SES-Gelenke ahmen ein von Spinnen inspiriertes Exoskelett nach, das sowohl aus starren als auch weichen Elementen besteht. Während jedoch das Tier eine hydraulische Kraft beim Strecker der Beine erzeugt, ist es beim Roboter genau anders herum, nämlich wenn er seine Beine anwinkelt.
Wie lassen sich die Gelenke bewegen?
Die Gelenke bestehen aus einem weichen Beutel, der aus dünner Kunststofffolie – zum Beispiel Polyester oder Polypropylen – hergestellt wird. Diesen füllen die Forscher mit einer elektrisch insulierenden Substanz. Hierfür wird ein einfaches Pflanzenöl genutzt. Dann befestigen sie Elektroden auf jeder Seite des Beutels. Der Beutel wiederum ist verbunden mit einem starren Drehgelenk.
Wenn eine Hochspannung zwischen den Elektroden angelegt wird, bewirken die elektrostatischen Kräfte, dass sich das Pflanzenöl im Inneren des Beutels verschiebt und sich so das Gelenk dreht. SES-Gelenke lassen sich bis zu 70 Grad drehen. Das hat ein hohes Drehmoment zur Folge. Zudem kehren die Gelenke automatisch in ihre Ausgangsposition zurück.
Die Gelenke sind sehr einfach und leicht, da es keine peripheren Komponenten gibt, die den Roboter beschweren. Die von Spinnen inspirierten Gelenke sind leistungsstark, verbrauchen wenig Energie, und sind einfach herzustellen. Zudem lassen sich für die Herstellung auch Kunststoffe verwenden, mit denen Lebensmittel, beispielsweise Chips-Tüten, verpackt werden. Das sind alles Kriterien, die beim Design maßgeblich sind, wenn sich die Roboter auf viele verschiedene Arten bewegen und eine Vielzahl von Objekten greifen sollen, ohne sie kaputt zu machen.
Die Greifhand mit drei Fingern ist eine Anwendung, mit der das Team die Vielseitigkeit der SES-Gelenke unter Beweis stellt. Hier zeigt sich auch der Vorteil, dass es keine peripheren Komponenten gibt. Hätte das Team den Greifer stattdessen mit künstlichen Muskeln ausgestattet, wären diese im Weg, wenn die Robotik-Hand ein Objekt greift. Die SES-Gelenke hingegen benötigen weitaus weniger Platz.
Vielseitige Anwendungsmöglichkeiten denkbar
Einen Spinnenroboter zu bauen war anfänglich nicht das primäre Ziel. Es sollte vielmehr ein modernes, vielseitiges Gelenk entwickelt werden, das man in jede Art von Roboter einbauen kann. Besonders für kleine Robotersysteme, die nur wenige Zentimeter groß sind, bei denen der begrenzte Platz die Wahl des Antriebs stark einschränkt, könnten SES-Gelenke in Zukunft sehr nützlich sein.
(ID:47478211)
:quality(80)/p7i.vogel.de/wcms/ee/1b/ee1bf8fb4b4ff596a82e22513fab5c16/0126917674v1.jpeg "Forscher stellen eine neue Methode vor, mit der sie die Magnetisierung kleiner Roboter neu ausrichten können - dazu werden die magnetischen Röhrchen wie Matroschka-Puppen ineinander gestapelt. (Bild: © Dmitry - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/dd/94/dd94e71da325788b2a5995cb31c36018/0127564528v1.jpeg "Magnetisches Jamming eröffnet neue Möglichkeiten für die Mikrorobotik. (Bild: MPI-IS)")