:quality(80)/p7i.vogel.de/wcms/2b/d4/2bd40168bce48c337b86a451b11fd865/hqdipr202606197409-02-1000x563v1.jpeg "Sinumerik One bildet die technologische Basis für das Retrofit von Walzenschleifmaschinen und ermöglicht eine moderne, leistungsfähige CNC-Steuerung. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/61/71/617123e3846b0079e580895c5bc37d40/2-995x560v1.png "Das Forschungsteam an der TU München misst und regelt die Sehnenkräfte an dem Roboter. Das Ziel des Forschungsprojekts sind neuartige Regelungskonzepte. (Bild: TU München)")
:quality(80)/p7i.vogel.de/wcms/d5/09/d5091cd9a582aa0f780740ec4faac973/0130381601v2.jpeg "Die Besucher freuten sich vor allem über das vielfältige Programm. (Bild: Stefan Bausewein/VCG)")
:quality(80)/p7i.vogel.de/wcms/b6/f5/b6f57042111d87f229188016760aa9be/0130112613v2.jpeg "„Den Teilnehmern werden auch Strategien vorgestellt, wie sie nicht nur gesetzliche Vorgaben erfüllen, sondern auch Innovationsführer in ihrem Sektor werden können“, so Michelle Duerksen, Sustainability Sales Manager bei Schneider Electric. (Bild: Schneider Electric)")
:quality(80)/p7i.vogel.de/wcms/9e/aa/9eaa7c35ae37442f131b821e70ac300a/aveva-digitales-20ecosystem-8688x4885v1.jpeg "Der KI-Assistent identifiziert die relevanten Daten und liefert eine zusammengefasste Antwort. Bei Bedarf generiert er direkt eine Visualisierung als Dashboard oder Trendansicht, die sich speichern und teilen lässt. (Bild: Aveva)")
:quality(80)/p7i.vogel.de/wcms/0d/7c/0d7c8417e1b596c83da6912c9a6d62f5/adobestock-2012652009--c2-a9-20masque-20--20stock-adobe-com-5460x3072v1.jpeg "Physical AI erfordert aufgrund der engen Verzahnung von Wahrnehmung, Entscheidungslogik und Aktion erweiterte Sicherheitskonzepte. (Bild: Masque - stock.adobe.com Masque - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/7a/12/7a12d7ab565963a22c21ba8b30bf542d/visometry-kunde-wisag-1-3045x1714v1.jpeg "Komplexe Schweißbaugruppen schnell und flexibel kontrolliert: Das AR-Tool Twyn hat die Qualitätsprüfung bei Wisag beschleunigt, vereinfacht und verbessert. (Bild: Visometry)")
:quality(80)/p7i.vogel.de/wcms/46/b6/46b6e9c4103d5cf4bce4f15683cacbe8/newsimage424473-5719x3217v1.jpeg "Die grüne Platine enthält den elektronischen Schaltkreis, mit dem die Forschenden Sensordaten über die vorhandenen Stromanschlüsse einer Batteriezelle übertragen. Die Batteriezelle befindet sich im Hintergrund. (Bild: Christina Anders, Uni Kiel)")
:quality(80)/p7i.vogel.de/wcms/6e/e1/6ee1cd25a113190ad4e950cd48358ed2/68a9c218-2278-42ec-8419-8fd0cabfb7f9-1-3411x1917v1.jpeg "Auf der SPS 2025 zeigte Murrelektronik, wie dezentrale Automatisierung funktioniert. (Bild: S. Häuslein/VCG)")
:quality(80)/p7i.vogel.de/wcms/5c/a6/5ca6d7681aaa7f22c94e7170139705f2/org-blobs-user-response-file-output-769154c8-3d5f-4254-b4d2-9c99d5b816c2-plugin-output-dxpius7b-1672x940v1.png "Westadraht hält technische Litzen und Leitungen, Kupfer- und Abschirmgeflechte, verzinnte und versilberte Drähte sowie Isolier- und Schutzschläuche für seine Kunden bereit. (Bild: KI-generiert / Gemini)")
:quality(80)/p7i.vogel.de/wcms/3a/5c/3a5c9af4fb1ccb71b99d1608830dd1bc/ifm-pm-20798-20print-4000x2251v1.jpeg "Der neue VMB für den Einsatz in mobilen Maschinen bietet eine Schwingungsüberwachung in alle drei Raumrichtungen. (Bild: ifm electronic gmbh)")
:quality(80)/p7i.vogel.de/wcms/de/85/de85ce3a1d050917e298287821dc9dfa/june12finals-8-bncrop-2048x1170-2048x1153v1.jpeg "Eine von Forschern der UC Berkeley entwickelte „elektronische Nase“ kann die von verdorbenen Lebensmitteln und Lebensmittelallergenen abgegebenen Gase besser erkennen als die menschliche Nase. (Bild: Brandon Sánchez-Mejia/UC Berkeley)")
:quality(80)/p7i.vogel.de/wcms/69/46/6946c24861c25a7d75228f63cc6a5253/0131864932v2.jpeg "Auf das IO-Link Gesamtpaket kommt es an. Wenn das Zusammenspiel von Sensoren, leistungsstarken Mastern und einem herstellerunabhängigen Konfigurationstool stimmt, ist eine deutlich gesteigerte Maschinenperformance möglich. (Bild: Baumer)")
:quality(80)/p7i.vogel.de/wcms/32/3d/323d0774d5c3e5d671c16323c2012c1d/kollmorgen-image-201-3872x2179v1.jpeg "In Gefahrenzonen sind explosive Gase oder brennbare Stäube nicht dauerhaft vorhanden; unter anormalen Betriebsbedingungen oder für begrenzte Zeiträume können sie jedoch auftreten. (Bild: Kollmorgen)")
:quality(80)/p7i.vogel.de/wcms/25/67/2567a762b26115eddacae3a2f3b7d560/inovance-20x-20vascat-203-1600x900v1.jpeg "David Bedford Guaus (re.), Country Manager bei Inovance Technology Spain und Technischer Direktor für Inovance in den Regionen Europa und Nordamerika, sagt: „Die gemeinsame Suche nach einer Lösung zur Integration unserer Antriebe in das System hat unsere Zusammenarbeit mit Vascat weiter verbessert und wir hoffen sehr, in Zukunft wieder zusammenzuarbeiten.“ (Bild: Inovance)")
:quality(80)/p7i.vogel.de/wcms/28/5a/285af4d2fc9c346303d06078a497c9ce/energieeffizienz-20in-20der-20antriebstechnik-1-6456x3634v1.png "Durch den Einsatz moderner Frequenzumrichter lassen sich Lastspitzen reduzieren und Energieanteile aus Bremsvorgängen zurückführen. (Bild: Mitsubishi Electric)")
:quality(80)/p7i.vogel.de/wcms/b1/31/b131c9e871097195ac67951ba69c48eb/roboter-20in-20smart-20factory-20lemgo-1920x1080v1.jpeg "Das Humanoid Robots Experience Lab des Fraunhofer IOSB ermöglicht Unternehmen und Organisationen die praxisnahe Erprobung humanoider Robotik. (Bild: Fraunhofer IOSB)")
:quality(80)/p7i.vogel.de/wcms/61/53/615308b0e87c8a3f91d5340dda26bb46/260414-abb-robotics-gofa-ultra-accuracy-5312x2988v1.jpeg "Intuitive No‑Code‑Tools und KI‑gestützte Software senken die Einstiegshürden in die Robotik und machen sie selbst für Anwenderinnen und Anwender ohne Programmierkenntnisse schnell zugänglich. (Bild: ABB Robotics)")
:quality(80)/p7i.vogel.de/wcms/fa/f2/faf284fe04f4d250d717eb1d31dc9cfa/geralt-artificial-intelligence-3382507-4200x2361v1.jpeg "Elektronik, die lernt: Eine neue Technik nach Vorbild des Gehirns haben Würzburger Forscher entwickelt. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/82/2e/822e0641eaa6171be238a35a732a1ac4/nature-manifest-mirko-kovac-870-853x480v1.jpeg "Mirko Kovač fordert mit einem Manifest die Etablierung von «Sustainability Robotics» als neue wissenschaftliche Disziplin. Ziel ist es, Robotik konsequent an ökologischen, gesellschaftlichen und wirtschaftlichen Nachhaltigkeitszielen auszurichten. (Bild: Empa)")
:quality(80)/p7i.vogel.de/wcms/b6/1e/b61ee9620cff0c1e614d908d5036220b/wertsch-c3-b6pfung-kigeneriert-gemini-1018x573v1.jpeg "Digitale Technologien ermöglichen die Erfassung und Auswertung von Daten entlang des gesamten Produktlebenszyklus und gelten als Schlüssel für zirkuläre Wertschöpfung. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/e7/3e/e73e7453e41c35c939d0b3ca17c4eb81/factory-20x-panelteilnehmer-20zum-20thema-20industrie-20im-20wandel-20-e2-80-93-20ohne-20daten--c3-96kosysteme-20keine-20-28ki--29-20zukunft-small-3000x1687v1.jpeg "Panelteilnehmer zum Thema: „Industrie im Wandel – ohne Daten-Ökosysteme keine (KI-) Zukunft?“
Von links nach rechts: Rainer Brehm (SIEMENS), Dr. Stephan Mayer (Trumpf); Prof.Dr. Dipl-Ing Berend Denkena (DMG Mori) Dr. Beate Baron (BMWE), Hagen Heubach (SAP)
(Bild: Factory-x)")
:quality(80)/p7i.vogel.de/wcms/56/7b/567b3d4b554a1dbdcf835918350c021a/symbolbild-wahrnehmung-ki-1364x768v1.jpeg "KI-Modelle verarbeiten visuelle Informationen oft fragmentiert – neue Trainingsansätze setzen hier an. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/93/1a/931a35db6d90693283049b840dcacd2b/st-hannover-149-6048x3400v1.jpeg "Der fachliche Austausch zwischen Besucher und Aussteller ist das, was die Schraubtec ausmacht. (Bild: PHOTOVISION-DH GmbH)")
:quality(80)/p7i.vogel.de/wcms/68/89/6889ce824f7362d1ee31c6114039849d/0131677915v2.jpeg "Nur menschliche Empathie schafft echte Beziehungen. Führungskräfte, die Hoffnung vermitteln und Vertrauen im Alltag leben, verwandeln Risiken automatisierter Entscheidungen in Chancen, die Organisation und Mitarbeitende gleichermaßen stärken. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/ed/02/ed02ce464ed1a39dcd7a617f55a4ffc1/0131677386v2.jpeg "Durch das Nutzen von KI gewinnen Führungskräfte Zeit für Entwicklungsgespräche, Perspektivenarbeit und persönliche Begleitung. Diese menschliche und persönliche Zuwendung signalisiert Mitarbeitern Wertschätzung und eröffnet Zukunftschancen. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/7d/df/7ddf9467a9acc812e8cc29324c3b080e/0131729703v2.jpeg "Zu viele verschiedene Varianten machen das Handling unübersichtlich. Denn ein geändertes Bauteil betrifft nicht nur eine Stückliste, sondern zieht Anpassungen in Prüfplänen, Dokumentation, Parametrierung und Ersatzteillogik nach sich. (Bild: © Radoman Durkovic - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/58/63/586379bda19d8f06e6015cecb41a4967/kampagnenbild-1947x1095v1.png "(Bild: ANSYS Germany GmbH )")
:quality(80)/p7i.vogel.de/wcms/d1/12/d112dfa6e7df4c7af715a4833483f659/0126977441v1.jpeg "DIN RAIL SMART PROTECTION: RACPRO1 E-FUSE MODULE (Bild: RECOM Power GmbH)")
MRK Wie Mensch-Roboter-Arbeitsplätze besser geplant werden können
Einen Mensch-Roboter-Arbeitsplatz einzurichten ist heutzutage noch sehr aufwändig. Deshalb entwickelt das Fraunhofer IFF zusammen mit Systemintegrator Symacon neue Werkzeuge, um MRK-Applikationen vorab besser zu planen.
Anbieter zum Thema
:fill(fff,0)/p7i.vogel.de/companies/69/cb/69cb7d25c6605/ro-a-3c-5.jpeg "ro-a-3c-5 (ROSE Systemtechnik)")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/76800/76895/65.jpg "FAULHABER_120mm.jpg ()")
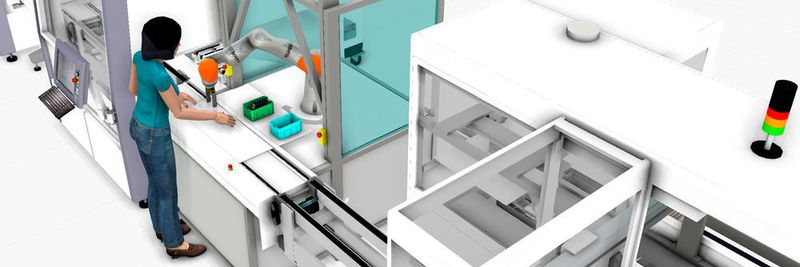
Kollaborative Roboter sind durch Sensortechnik in der Lage, ihre Umgebungen zu erfassen und können viel flexibler auf Ereignisse reagieren als die erste Generation von Industrierobotern. Sie erlauben somit eine enge bis unmittelbare Zusammenarbeit mit der Maschine, ohne die Gefahr, dass der Mensch vom mitarbeitenden Roboter verletzt wird.
Hohe Sicherheitsanforderungen an kollaborative Robotersysteme
Der flächendeckende Einsatz in der Industrie bleibt ihnen jedoch noch verwehrt. Tatsächlich stellen die hohen Sicherheitsanforderungen an kollaborative Robotersysteme Systemintegratoren und Anlagenplaner heute noch vor große Herausforderungen. In jedem Einzelfall muss detailliert geklärt werden, welche Auswirkung die verschiedenen eingesetzten Sicherheitssensoren auf den konkreten Prozess, in den der Roboter integriert ist, auf die unmittelbare Umgebung und an die Art der Kollaboration zwischen Menschen und Roboter haben. Er darf sowohl den Menschen, der in seiner Nähe arbeitet, auf keinen Fall verletzen, als auch durch seine reaktiven Änderungen der Bewegungsabläufe den Produktionsprozess nicht signifikant stören.
27. September 2017 in Würzburg - Kongress für funktionale Sicherheit
Anwendertreff zu denThemen der funktionale Sicherheit von Maschinen und Anlagen sowie der funktionaler Sicherheit in der Praxis. Am 27. September 2017treffen sich zum 5. Mal Maschinensicheits-Experten auf dem Anwendertreff Maschinensicherheit in Würzburg.
„Mit den heute üblichen Planungs- und Entwurfsmethoden lassen sich solche Fragen, wenn überhaupt, nur bedingt beantworten“, beschreibt Roland Behrens vom Fraunhofer IFF die Situation. Er ist am Magdeburger Forschungsinstitut für die Entwicklung neuer Robotiksysteme mit MRK-Funktion und ihre Integration in industrielle Abläufe verantwortlich „Das Problem ist, dass die vorhandenen Werkzeuge nicht an die relevanten Sicherheitsvorgaben der MRK angepasst sind“, sagt der Robotikexperte. Heute sei es beispielsweise nicht möglich, kritische Sicherheitsaspekte für moderne Robotik- und Assistenzsysteme bereits in der Planungsphase zu berücksichtigen, da die hierfür erforderlichen Planungsmittel wie Softwaretools, Abläufe, etc. fehlen. Folglich können die Auswirkungen der Integration solcher Systeme erst später getestet werden. Das macht es für die Unternehmen schwerer, ihren Einsatz flexibel zu planen.
Projekt entwickelt Werkzeug, um MRK besser zu planen
Das Projekt „Innovative Entwicklungswerkzeuge zur effizienten Planung von industriellen Applikationen mit Mensch-Roboter-Kooperation“ – oder kurz MR-KOOP – will jetzt diese Lücke schließen. In Kooperation mit dem Systemintegrator Symacon GmbH entwickelt und testet das Fraunhofer IFF jetzt neue Werkzeuge dafür. Das Ziel ist es, Unternehmen ein Basiswerkzeug zur Planung von Roboterzellen mit speziellen MRK-Funktionen zur Verfügung zu stellen. Sie soll eine frühzeitige Bewertung der Sicherheitsvorgaben für Anlagen ermöglichen, welche die Sicherheitsbetriebsarten „Sicherheitsbewerteter überwachter Halt“ und „Geschwindigkeits- und Abstandsüberwachung“ nach ISO/TS 15066 umsetzen.
Das Projekt hat eine Laufzeit von 24 Monaten wird durch die Investitionsbank Sachsen-Anhalt und den Europäischen Regionalen Entwicklungsfonds (EFRE) gefördert.
:quality(80)/images.vogel.de/vogelonline/bdb/1273100/1273125/original.jpg "Um Menschen bei gefährlichen Arbeiten im Weltall zu entlasten, könnten zukünftig teilautonome Roboter helfen, die vom Verhalten der Menschen lernen. (gemeinfrei)")
Roboter
Autonome Roboter fürs Weltall und für Produktionshallen
(ID:44863552)
:quality(80)/p7i.vogel.de/wcms/fe/a9/fea9a3b627ed420d71b064f9f93e84d1/0126599764v2.jpeg "Der Markt hält eine Fülle an verschiedenen Cobots parat: Das Spektrum reicht etwa von ein- oder mehrachsigen Cobots mit Traglasten bis 20 kg, Reichweiten bis zu 1.500 mm und und unterschiedlichen Geschwindigkeiten bis hin zu mobilen Lösungen. (Bild: Beckhoff)")
:quality(80)/p7i.vogel.de/wcms/1d/11/1d111494bf6a2296303cf5c81e24e0cc/0128208922v2.jpeg "Insgesamt sind bei Junior Kühlkörper mehr als 40 Cobots aus der E-Serie und der neuen Generation von Universal Robots im produktiven Einsatz. (Bild: Junior Kühlkörper)")