:quality(80)/p7i.vogel.de/wcms/2b/d4/2bd40168bce48c337b86a451b11fd865/hqdipr202606197409-02-1000x563v1.jpeg "Sinumerik One bildet die technologische Basis für das Retrofit von Walzenschleifmaschinen und ermöglicht eine moderne, leistungsfähige CNC-Steuerung. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/61/71/617123e3846b0079e580895c5bc37d40/2-995x560v1.png "Das Forschungsteam an der TU München misst und regelt die Sehnenkräfte an dem Roboter. Das Ziel des Forschungsprojekts sind neuartige Regelungskonzepte. (Bild: TU München)")
:quality(80)/p7i.vogel.de/wcms/d5/09/d5091cd9a582aa0f780740ec4faac973/0130381601v2.jpeg "Die Besucher freuten sich vor allem über das vielfältige Programm. (Bild: Stefan Bausewein/VCG)")
:quality(80)/p7i.vogel.de/wcms/b6/f5/b6f57042111d87f229188016760aa9be/0130112613v2.jpeg "„Den Teilnehmern werden auch Strategien vorgestellt, wie sie nicht nur gesetzliche Vorgaben erfüllen, sondern auch Innovationsführer in ihrem Sektor werden können“, so Michelle Duerksen, Sustainability Sales Manager bei Schneider Electric. (Bild: Schneider Electric)")
:quality(80)/p7i.vogel.de/wcms/f7/87/f787c54cc9e3fa178b3286106bbc553f/adobestock-2094179731--thipsuda-stock-adobe-com-ki-generiert-1905x1072v1.jpeg "Quantenrepeater verteilen Quanteninformationen und Verschränkung über weite Strecken und bilden so die technologische Basis für das Quanteninternet der Zukunft. (Bild: © Thipsuda – stock.adobe.com / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/9a/27/9a2784ee5bb7f595a8c08726ec3f9ecc/ziaurrehman-f-cybersecurity-10398389-5460x3072v1.jpeg "Ein Klick, ein Stillstand: Wie Ransomware die Fabrik von Fairlife lahmlegte. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/42/96/42969a1445c4620ef0cbae7ec8191391/0132052516v2.jpeg "Wenn es um das Wärmemanagement geht, sollten Hardware-Entwickler und Konstrukteure zusammenarbeiten. (Bild: ROSSandHELEN photoqraphers)")
:quality(80)/p7i.vogel.de/wcms/51/ee/51eee66f28d9ed77af7d27a38cd2108b/pm3526-1-3027x1703v1.jpeg "In der automatisierten Fluggastbrücke von Reel sorgen Energieketten und Leitungen von Igus für eine hohe Ausfallsicherheit im Flughafenbetrieb. (Bild: Igus)")
:quality(80)/p7i.vogel.de/wcms/cc/e3/cce35deb9b98be9cb9f78e66e7b0a661/newsimage425331-2960x1666v1.jpeg "Mit dem Lightweaver-Mikroskop lässt sich ein zehnmal größeres Bildfeld erzielen als bisher möglich war. (Bild: Universität Bielefeld/Jana Haver)")
:quality(80)/p7i.vogel.de/wcms/0a/c6/0ac6b2ca4dc4f2d7c6f6e95037de2d5d/newsimage425297-2250x1265v1.png "Das Kühlsystem eines Quantencomputers hält die Quantenchips bei Temperaturen nahe dem absoluten Nullpunkt. Erst unter diesen Bedingungen können sie ihre besonderen Quanteneigenschaften entfalten (künstlerische Darstellung). (Bild: B. Schröder/HZDR)")
:quality(80)/p7i.vogel.de/wcms/a5/45/a5458619d70f86cc6edb203f9aa9d06b/aufmacher-3-2598x1462v1.jpeg "Mit der Funktionserweiterung zur Oberflächeninspektion präsentiert sich 3D-Inspect als leistungsfähige und zugleich erschwingliche Plattform für 3D-Analysen. (Bild: Micro-Epsilon Messtechnik GmbH & Co. KG)")
:quality(80)/p7i.vogel.de/wcms/8b/9d/8b9df47239100d03e6e7f69cf2d6cb03/eq9a0354-kl-1500x844v1.jpeg "Andreas Hoffmann verantwortet bei EBE das Produktmanagement sowie den Vertrieb von HMI-Komponenten. (Bild: EBE)")
:quality(80)/p7i.vogel.de/wcms/ef/2c/ef2c4c5700d487b6f3676797fe23d4b7/eq9a0354-kl-1500x844v1.jpeg "Andreas Hoffmann ist bei EBE Sensors + Motion als Produktmanager HMI tätig. (Bild: EBE)")
:quality(80)/p7i.vogel.de/wcms/19/dd/19dd5f52d6bad28d399626eadcc8396c/0132353833-1000x563v1.jpeg "Im durchsichtigen, 3D-gedruckten Bauteil, dreht sich der schwebende „Schwimmer“ (rot-blau markiert) an der Wasseroberfläche. (Bild: Cheng Zeng / Sinano)")
:quality(80)/p7i.vogel.de/wcms/32/3d/323d0774d5c3e5d671c16323c2012c1d/kollmorgen-image-201-3872x2179v1.jpeg "In Gefahrenzonen sind explosive Gase oder brennbare Stäube nicht dauerhaft vorhanden; unter anormalen Betriebsbedingungen oder für begrenzte Zeiträume können sie jedoch auftreten. (Bild: Kollmorgen)")
:quality(80)/p7i.vogel.de/wcms/25/67/2567a762b26115eddacae3a2f3b7d560/inovance-20x-20vascat-203-1600x900v1.jpeg "David Bedford Guaus (re.), Country Manager bei Inovance Technology Spain und Technischer Direktor für Inovance in den Regionen Europa und Nordamerika, sagt: „Die gemeinsame Suche nach einer Lösung zur Integration unserer Antriebe in das System hat unsere Zusammenarbeit mit Vascat weiter verbessert und wir hoffen sehr, in Zukunft wieder zusammenzuarbeiten.“ (Bild: Inovance)")
:quality(80)/p7i.vogel.de/wcms/b9/00/b900518354ac558a14bc60599284bff0/gemini-generated-image-physical-20ai-2728x1536v1.png "Wahrnehmen, entscheiden, handeln: Bei Physical AI verschmelzen Aktorik, 3D-Sensorik und Edge-Computing zu einem geschlossenen System. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/09/69/09695c87c8d85c087117e1f8e784562a/pm3626-1-2551x1435v1.jpeg "Damit Bootsrümpfe sauber bleiben: Der Unterwasserroboter KeelCrab nutzt schmierfreie Polymerlager von igus für einen wartungsarmen und korrosionsfreien Einsatz im Salzwasser. (Bild: Igus SE & Co. KG / KI-unterstützt)")
:quality(80)/p7i.vogel.de/wcms/87/0c/870ca78978ff2a03f4fd558dc978dbeb/newsimage425258-3000x1687v1.jpeg "Studenten vom Campus Gütersloh haben einen Pancake-Roboter gebaut, der selbstgezeichnete Formen zu individuellen, farbigen Pancakes drucken kann. (Bild: P. Pollmeier/HSBI)")
:quality(80)/p7i.vogel.de/wcms/70/6f/706f580af54fe933872e86f3d3f0386e/hm26-13-000042-1600x900v1.png "Der Robotics Award 2026 wurde an das Startup Good Bytz vergeben. Die prämierte Lösung ist ein Küchensystem, in dem leichte, kompakte Industrieroboter zum Einsatz kommen. (Bild: Deutsch Messe AG)")
:quality(80)/p7i.vogel.de/wcms/d6/14/d614c42f7644d82f3347686e8c249df8/adobestock-452368624--c2-a9-20digital-20gfx-20-e2-80-93-20stock-adobe-com-7000x3940v1.jpeg "Noch Zukunftsmusik, aber mit konkretem Potenzial: Quantencomputing könnte Energienetze und Lieferketten nachhaltiger machen. (Bild: © Digital GFX – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/b6/1e/b61ee9620cff0c1e614d908d5036220b/wertsch-c3-b6pfung-kigeneriert-gemini-1018x573v1.jpeg "Digitale Technologien ermöglichen die Erfassung und Auswertung von Daten entlang des gesamten Produktlebenszyklus und gelten als Schlüssel für zirkuläre Wertschöpfung. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/e7/3e/e73e7453e41c35c939d0b3ca17c4eb81/factory-20x-panelteilnehmer-20zum-20thema-20industrie-20im-20wandel-20-e2-80-93-20ohne-20daten--c3-96kosysteme-20keine-20-28ki--29-20zukunft-small-3000x1687v1.jpeg "Panelteilnehmer zum Thema: „Industrie im Wandel – ohne Daten-Ökosysteme keine (KI-) Zukunft?“
Von links nach rechts: Rainer Brehm (SIEMENS), Dr. Stephan Mayer (Trumpf); Prof.Dr. Dipl-Ing Berend Denkena (DMG Mori) Dr. Beate Baron (BMWE), Hagen Heubach (SAP)
(Bild: Factory-x)")
:quality(80)/p7i.vogel.de/wcms/1e/e9/1ee9d6e483fa9e4f5e07c3a74ef2a3cd/adobestock-795201631--c2-a9-20org-20-e2-80-93-20stock-adobe-com-ki-generiert-8697x4896v1.jpeg "Die Zahl der offenen Stellen in der Elektroindustrie stieg im ersten Halbjahr 2026 deutlich an. (Bild: © ORG – stock.adobe.com / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/93/1a/931a35db6d90693283049b840dcacd2b/st-hannover-149-6048x3400v1.jpeg "Der fachliche Austausch zwischen Besucher und Aussteller ist das, was die Schraubtec ausmacht. (Bild: PHOTOVISION-DH GmbH)")
:quality(80)/p7i.vogel.de/wcms/68/89/6889ce824f7362d1ee31c6114039849d/0131677915v2.jpeg "Nur menschliche Empathie schafft echte Beziehungen. Führungskräfte, die Hoffnung vermitteln und Vertrauen im Alltag leben, verwandeln Risiken automatisierter Entscheidungen in Chancen, die Organisation und Mitarbeitende gleichermaßen stärken. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/58/63/586379bda19d8f06e6015cecb41a4967/kampagnenbild-1947x1095v1.png "(Bild: ANSYS Germany GmbH )")
:quality(80)/p7i.vogel.de/wcms/d1/12/d112dfa6e7df4c7af715a4833483f659/0126977441v1.jpeg "DIN RAIL SMART PROTECTION: RACPRO1 E-FUSE MODULE (Bild: RECOM Power GmbH)")
Hannover Messe 2014 Neues aus dem Festo-Zoo: BionicKangaroo mit energieeffizienter Sprungkinematic
Festo lüftet das Geheimnis um seine tierische Attraktion auf der diesjährigen Hannover Messe: Nach Bionicopter, Smart Bird und Co. stellt Festo bei einer Online-Presskonferenz das BionicKangaroo mit energieeffizienter Sprungkinematic vor.
Anbieter zum Thema
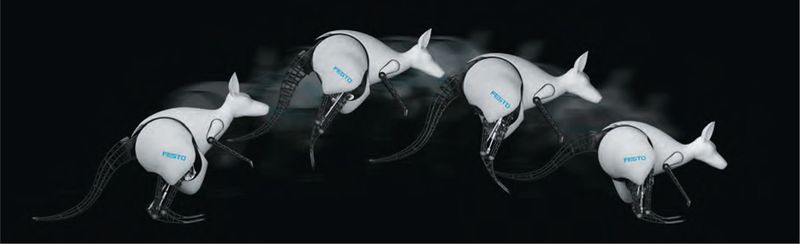
Knapp zwei Jahre befasste sich ein Entwicklerteam aus dem Bionic Learning Network von Festo damit, das Sprungverhalten des natürlichen Kängurus realitätsnah nachzubilden und daraus zu lernen. „Mit dem BionicKangaroo stellen wir genau das vor, was ein natürliches Känguru auszeichnet, nämlich Energie rückzugewinnen, zu speichern und im nächsten Sprung wieder einzubringen“, erklärt Frontzek. Eine wichtige Funktion übernimmt dabei die Achillessehne, die beim natürlichen Känguru deshalb besonders ausgeprägt ist. „Die Funktion der natürlichen Achillessehne realisierten wir beim künstlichen Känguru mithilfe eines elastischen Federelements aus Gummi“, beschreibt Frontzek. Für die Stabilität bei Sprung und Landung sorgen das Condition Monitoring sowie die präzise Steuerungs- und Regelungstechnik. Gleichzeitig zeigt Festo, wie pneumatische und elektrische Antriebstechnik intelligent in einem hoch dynamischen System kombiniert werden kann.
:quality(80)/images.vogel.de/vogelonline/bdb/699800/699865/original.jpg "(Festo)")
:quality(80)/images.vogel.de/vogelonline/bdb/699800/699866/original.jpg "(Festo)")
:quality(80)/images.vogel.de/vogelonline/bdb/699800/699867/original.jpg "(Festo)")
:quality(80)/images.vogel.de/vogelonline/bdb/699800/699868/original.jpg "(Festo)")
Känguru mit Gestensteuerung hüpfen lassen
Besonderes Augenmerk legte das Team auf die mobile Energieversorgung des künstlichen Kängurus. In dem Körper wurde ein kleiner Kompressor eingesetzt. Die Kinematik ist aus lasergesinterten Bauteilen gefertigt, die mit Karbon verstärkt sind. Dadurch wiegt das künstliche Tier bei einer Größe von etwa einem Meter knapp sieben Kilogramm und kann bis zu 40 Zentimeter hoch und 80 Zentimeter weit springen. Das BionicKangaroo lässt sich über Gesten steuern.
Mobile Energieversorgung an Bord
Besonderes Augenmerk legte Festo auf die mobile Energieversorgung des künstlichen Kängurus und entwickelte dazu sogar zwei unterschiedliche Konzepte. In den Körper kann entweder ein kleiner Kompressor oder ein Hochdruckspeicher eingesetzt werden. Beide liefern beim Sprung die benötigte Druckluft, die durch zwei Magnetventile MHE2 von Festo exakt dosiert wird. Als elektrischer Energiespeicher dienen Lithium-Polymer-Akkus. Sie versorgen sowohl die Ventile als auch die elektrischen Antriebe und die integrierte CECC-Steuerung von Festo mit dem nötigen Strom.
Elektrische Antriebe für präzise Bewegungen
Im Stand berührt das Känguru mit beiden Füßen und dem Schwanz den Boden und verfügt so über eine stabile Dreipunktauflage. Auch beim Sprung sorgt der Schwanz für die nötige Balance. Ein elektrischer Servomotor regelt dafür gezielt seinen Anstellwinkel und sorgt für die entsprechende Ausgleichsbewegung. Dadurch kompensiert das Känguru die Gegenbewegung seiner Beine, die für die Landephase nach vorne geholt werden müssen. Auch die Beine werden über zwei elektrische Servomotoren angesteuert, die zwischen Hüfte und Oberschenkel sitzen, sodass sie vorwärts und rückwärts bewegt werden können. Alle Steuersignale generiert dabei die Kompaktsteuerung. Pneumatische Aktoren für dynamisches Sprungverhalten Entlang der Unterschenkel ist jeweils ein pneumatischer Leichtbauzylinder DSNUP 20 von Festo angebracht, der das Bein aktuiert. Knie- und Fußgelenk sind über eine so genannte Zwangskinematik verbunden, wodurch sich ein gekoppelter Bewegungsablauf ergibt. Die Funktion der natürlichen Achillessehne übernimmt ein elastisches Federelement aus Gummi. Es ist am hinteren Teil des Fußes und parallel zu dem Pneumatikzylinder am Kniegelenk befestigt. Die künstliche Sehne dämpft den Sprung, nimmt gleichzeitig die kinetische Energie auf und setzt sie für den nächsten Sprung frei. Integrierte Steuerung, Regelung und Echtzeit-Diagnose Für die Stabilität bei Sprung und Landung sorgen das Condition Monitoring sowie die präzise Steuerungs- und Regelungstechnik.
Der Energiezustand des Kängurus, die Stellgrößen und Anstellwinkel werden permanent überwacht und ausgewertet. Parallel verarbeitet die Steuerung eine Vielzahl an Sensorwerten. Sie gehen in komplexe Regelungsalgorithmen ein, aus denen sich die Stellgrößen für die Ansteuerung der Zylinder und Motoren ergeben.
Um so wenig Masse wie möglich zu bewegen, sind alle Komponenten auf kleinstmöglichem Bauraum optimal ausgelegt, vernetzt und geregelt. Die Gehäuseelemente sind aus Schaum gefräst. Die Kinematik ist aus lasergesinterten Bauteilen gefertigt, die mit Karbon verstärkt sind. Dadurch wiegt das künstliche Tier bei einer Größe von etwa einem Meter knapp sieben Kilogramm und kann bis zu 40 Zentimeter hoch und 80 Zentimeter weit springen.
Präzise springen
Die Absprung- und die Flugphase Vor dem ersten Sprung wird die elastische Sehne pneumatisch vorgespannt. Das BionicKangaroo verlagert seinen Schwerpunkt nach vorne und beginnt zu kippen. Sobald ein definierter Winkel bei entsprechender Winkelgeschwindigkeit erreicht ist, werden die pneumatischen Zylinder betätigt, die Energie aus der Sehne wird frei und das Känguru springt los. Um möglichst weit zu springen, zieht das Känguru in der Flugphase seine Beine nach vorne. Dabei entsteht ein Drehmoment an der Hüfte, den das künstliche Tier mit einer Schwanzbewegung ausgleicht. Dadurch bleibt der Oberkörper nahezu waagerecht. Bei der Landung wird die Sehne wieder gespannt und somit die kinetische Energie des Sprungs in potentielle Energie umgewandelt. Die Energie ist dadurch im System gespeichert und kann für den zweiten Sprung abgerufen werden. Die Landephase ist der entscheidende Vorgang für die Energierückgewinnung. Sie ist für das effiziente Sprungverhalten des Kängurus verantwortlich. Während dieser Phase bewegt sich der Schwanz Richtung Boden und damit wieder in seine Ausgangslage zurück.
Reduzierter Energieeinsatz in den folgenden Sprüngen
Springt das Känguru weiter, leitet es die gespeicherte Energie des vorherigen Sprungs direkt in den nächsten Sprung ein. Dabei kommt die potentielle Energie aus der elastischen Sehne wieder zum Einsatz. Im richtigen Moment schalten die Ventile und der nächste Sprung beginnt. Auf diese Weise macht das BionicKangaroo mehrere Sprünge hintereinander. Soll es zum Stillstand kommen, muss es möglichst viel Energie absorbieren. Dazu werden die pneumatischen Aktoren entsprechend geschaltet und die Sehne wieder aktiv vorgespannt.
Hannover Messe: Halle 15, Stand D07
(ID:42595550)
:quality(80)/p7i.vogel.de/wcms/d4/51/d45146dd962a073a1b2b4876cdfc8d50/0127114767v1.jpeg "Sebastian Schrof ist Industriedesigner im Bionik-Team von Festo. Zu seinem ersten Projekt gehörte schon die Bionic Ant. (Bild: Sandro Kipar/VCG)")
:quality(80)/p7i.vogel.de/wcms/2e/45/2e45be2e106d90f702624d04d6d18fb9/0130687368v2.jpeg "Physical AI in der Praxis: Twincat Coagent übersetzt natürliche Sprache in Maschinenbefehle und ermöglicht die intuitive Steuerung komplexer mechatronischer Systeme. (Bild: Beckhoff Automation)")