:quality(80)/p7i.vogel.de/wcms/2b/d4/2bd40168bce48c337b86a451b11fd865/hqdipr202606197409-02-1000x563v1.jpeg "Sinumerik One bildet die technologische Basis für das Retrofit von Walzenschleifmaschinen und ermöglicht eine moderne, leistungsfähige CNC-Steuerung. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/61/71/617123e3846b0079e580895c5bc37d40/2-995x560v1.png "Das Forschungsteam an der TU München misst und regelt die Sehnenkräfte an dem Roboter. Das Ziel des Forschungsprojekts sind neuartige Regelungskonzepte. (Bild: TU München)")
:quality(80)/p7i.vogel.de/wcms/d5/09/d5091cd9a582aa0f780740ec4faac973/0130381601v2.jpeg "Die Besucher freuten sich vor allem über das vielfältige Programm. (Bild: Stefan Bausewein/VCG)")
:quality(80)/p7i.vogel.de/wcms/b6/f5/b6f57042111d87f229188016760aa9be/0130112613v2.jpeg "„Den Teilnehmern werden auch Strategien vorgestellt, wie sie nicht nur gesetzliche Vorgaben erfüllen, sondern auch Innovationsführer in ihrem Sektor werden können“, so Michelle Duerksen, Sustainability Sales Manager bei Schneider Electric. (Bild: Schneider Electric)")
:quality(80)/p7i.vogel.de/wcms/03/e3/03e358c7d85b64d95c4c2c972c7491f8/94048294.jpeg "Bei neuen Produktideen spielen die Kosten eine maßgebliche Rolle. Mit Design-to-Cost-Methoden lässt sich genau planen, wie Kosten am besten eingespart werden. (Bild: gemeinfrei)")
:quality(80)/p7i.vogel.de/wcms/8d/67/8d67542f3e3f9b82f36addcdb6fc9292/vdi-wissensforum-2000x1125v1.jpeg "Rund 320 Teilnehmende aus Industrie und Wissenschaft diskutierten aktuelle Entwicklungen in der Automatisierung. (Bild: VDI Wissensforum)")
:quality(80)/p7i.vogel.de/wcms/80/26/80264ee068ef7dcc1f342e5f4693743b/geralt-artificial-intelligence-3706562-4736x2667v1.jpeg "Unternehmen bauen zunehmend digitale Ökosysteme auf, um
übergeordnete Herausforderungen zu bewältigen – sei es schnellere Innovation, der Umgang
mit Lieferkettenvolatilität oder die Dekarbonisierung komplexer globaler Betriebe.
(Bild: )")
:quality(80)/p7i.vogel.de/wcms/5f/94/5f948e97ebbd674879b4ecde79fb8c12/0132092944v2.jpeg "Der Grundlagentag Wärmemanagement ist ein wesentlicher Bestandteil der Fachkonferenz „Power of Electronics” und hat sich ursprünglich aus den „Cooling Days” entwickelt. (Bild: Stefan Bausewein)")
:quality(80)/p7i.vogel.de/wcms/e2/73/e273e6370fb756735ac06d7ef14bf67c/adobestock-1877003493-puhimec-3521x1983v1.jpeg "Die Elektrifizierung der Industrie wird zur betriebswirtschaftlichen Notwendigkeit. Sie ermöglicht, Energie aus einem System zu beziehen, das sich besser steuern, prognostizieren und optimieren lässt als fossile Alternativen. (Bild: © puhimec – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/ef/a5/efa5c03f3c458a905668e4c8f9a12222/batterie-adobestock-1957383478-visionary-generiert-mit-ki-8190x4608v1.jpeg "Das Wachstum der deutschen Batterieindustrie wird primär von zwei industriellen Megatrends gestützt: dem anhaltenden Hochlauf der Elektromobilität sowie einer massiven Nachfrage nach stationären Speichersystemen. (Bild: AdobeStock_Visionary / generiert-mit-KI)")
:quality(80)/p7i.vogel.de/wcms/69/46/6946c24861c25a7d75228f63cc6a5253/0131864932v2.jpeg "Auf das IO-Link Gesamtpaket kommt es an. Wenn das Zusammenspiel von Sensoren, leistungsstarken Mastern und einem herstellerunabhängigen Konfigurationstool stimmt, ist eine deutlich gesteigerte Maschinenperformance möglich. (Bild: Baumer)")
:quality(80)/p7i.vogel.de/wcms/52/9e/529ed65065534bea9f29da7fe1346482/0131840272v2.jpeg "Jürgen Greger, Experte für industrielle Kommunikation bei Lapp. (Bild: Lapp)")
:quality(80)/p7i.vogel.de/wcms/e7/3e/e73e7453e41c35c939d0b3ca17c4eb81/factory-20x-panelteilnehmer-20zum-20thema-20industrie-20im-20wandel-20-e2-80-93-20ohne-20daten--c3-96kosysteme-20keine-20-28ki--29-20zukunft-small-3000x1687v1.jpeg "Panelteilnehmer zum Thema: „Industrie im Wandel – ohne Daten-Ökosysteme keine (KI-) Zukunft?“
Von links nach rechts: Rainer Brehm (SIEMENS), Dr. Stephan Mayer (Trumpf); Prof.Dr. Dipl-Ing Berend Denkena (DMG Mori) Dr. Beate Baron (BMWE), Hagen Heubach (SAP)
(Bild: Factory-x)")
:quality(80)/p7i.vogel.de/wcms/28/5a/285af4d2fc9c346303d06078a497c9ce/energieeffizienz-20in-20der-20antriebstechnik-1-6456x3634v1.png "Durch den Einsatz moderner Frequenzumrichter lassen sich Lastspitzen reduzieren und Energieanteile aus Bremsvorgängen zurückführen. (Bild: Mitsubishi Electric)")
:quality(80)/p7i.vogel.de/wcms/09/81/0981a58a68530db70d8d67ec13d1c823/adobestock-96039220--c2-a9-203dsculptor-20--20stock-adobe-com-6000x3375v1.jpeg "Anwendungen, die im Weltall eingesetzt werden, stellen höchste Anforderungen an Antriebe. (Bild: © 3dsculptor - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/ea/9e/ea9e4f2c125ec5104c325e471be60efe/0131632764v2.jpeg "Stefan Huber (Head of Research, FH Salzburg) und Martin Haidacher (Innovation Manager, B&R) gemeinsam mit Technik von B&R
(Bild: B&R Industrie-Elektronik GmbH)")
:quality(80)/p7i.vogel.de/wcms/e7/ce/e7ceeda3cc28f156a68f0511386bbdd9/20260402-fb3-billardtisch-pollmeier-0260-slider-2258x1270v1.jpeg "Studierende des praxisinterierten Bachelorstudiengangs Mechatronik/Automatisierung am Campus Gütersloh der HSBI entwickelten im Rahmen eines zweisemestrigen Projekts einen vollautomatisierten Billardtisch, der selbstständig gegen menschliche Spieler antreten kann. (Bild: P. Pollmeier/HSBI)")
:quality(80)/p7i.vogel.de/wcms/1e/fc/1efcbcfd82d344c6e52a9671dc6ad199/verity-20flugdrohne-2000x1125v1.jpeg "Die Flugroboter von Verity unterstützen im Logistik- und Einzelhandelssektor, indem sie Lagerbestände kontinuierlich überwachen – ohne GPS und menschliches Eingreifen. (Bild: Verity)")
:quality(80)/p7i.vogel.de/wcms/7a/13/7a132416dbdc9734c7c0ef2041cdd964/260615-aut-27-grafik-presseaussand-d-107371-2000x1124v1.jpeg "82% der befragten bewerten humanoide Roboter als Innovationstreiber der Zukunft.
(Bild: Messe München)")
:quality(80)/p7i.vogel.de/wcms/ef/e4/efe4e9f4fdd8bcb08127915e2dae0d73/0132016773v1.jpeg "Mit der Validierung des Laserverstärkers an einem Ionenfallen-Quantencomputer von „NeQxt“ wird in Zusammenarbeit mit dem Fraunhofer IZM aus Berlin ein Baustein zur technologischen Souveränität Europas in Sachen Quantencomputing aus der Taufe gehoben. (Bild: „NeQxt“)")
:quality(80)/p7i.vogel.de/wcms/56/7b/567b3d4b554a1dbdcf835918350c021a/symbolbild-wahrnehmung-ki-1364x768v1.jpeg "KI-Modelle verarbeiten visuelle Informationen oft fragmentiert – neue Trainingsansätze setzen hier an. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/e3/c6/e3c68f83504c098804f49c6c0ab68afa/trucks-with-vipv-on-bridge-5472x3076v1.jpeg "Insbesondere Lieferwagen, Lkw und Anhänger verfügen über viel Dachfläche und verbrauchen gleichzeitig viel Energie für Kühlung, Heizung und Hilfsaggregate. Integrierte Solarmodule sind sinnvolle Lösung. (Bild: IM Efficiency)")
:quality(80)/p7i.vogel.de/wcms/93/1a/931a35db6d90693283049b840dcacd2b/st-hannover-149-6048x3400v1.jpeg "Der fachliche Austausch zwischen Besucher und Aussteller ist das, was die Schraubtec ausmacht. (Bild: PHOTOVISION-DH GmbH)")
:quality(80)/p7i.vogel.de/wcms/68/89/6889ce824f7362d1ee31c6114039849d/0131677915v2.jpeg "Nur menschliche Empathie schafft echte Beziehungen. Führungskräfte, die Hoffnung vermitteln und Vertrauen im Alltag leben, verwandeln Risiken automatisierter Entscheidungen in Chancen, die Organisation und Mitarbeitende gleichermaßen stärken. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/ed/02/ed02ce464ed1a39dcd7a617f55a4ffc1/0131677386v2.jpeg "Durch das Nutzen von KI gewinnen Führungskräfte Zeit für Entwicklungsgespräche, Perspektivenarbeit und persönliche Begleitung. Diese menschliche und persönliche Zuwendung signalisiert Mitarbeitern Wertschätzung und eröffnet Zukunftschancen. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/7d/df/7ddf9467a9acc812e8cc29324c3b080e/0131729703v2.jpeg "Zu viele verschiedene Varianten machen das Handling unübersichtlich. Denn ein geändertes Bauteil betrifft nicht nur eine Stückliste, sondern zieht Anpassungen in Prüfplänen, Dokumentation, Parametrierung und Ersatzteillogik nach sich. (Bild: © Radoman Durkovic - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/58/63/586379bda19d8f06e6015cecb41a4967/kampagnenbild-1947x1095v1.png "(Bild: ANSYS Germany GmbH )")
:quality(80)/p7i.vogel.de/wcms/d1/12/d112dfa6e7df4c7af715a4833483f659/0126977441v1.jpeg "DIN RAIL SMART PROTECTION: RACPRO1 E-FUSE MODULE (Bild: RECOM Power GmbH)")
Fachkräftemangel Roboter soll fehlende Fachkräfte kurzfristig ersetzen
Fachkräfte, die kurzfristig ausfallen, stellen mittelständische Unternehmen oft vor große Probleme. Ein mobiler Roboter soll jetzt an Werkzeugmaschinen einspringen können und Fachkräfte ersetzen.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/76800/76895/65.jpg "FAULHABER_120mm.jpg ()")
Vor allem mittelständischen Unternehmen bereitet der Fachkräftemangel große Probleme. Bei längeren Ausfällen durch Krankheit, Elternzeit oder bei kurzfristigen Arbeitsspitzen ist es oft schwer, die fehlende Fachkraft kurzfristig zu ersetzen. Dafür hat das Fraunhofer-Institut für Werkzeugmaschinen und Umformtechnik IWU zusammen mit dem Lösungsanbieter Industrie-Partner den „Robo Operator“ entwickelt: Ein mobiler Roboter, der autonom Werkzeugmaschinen bedienen kann.
Ein autonomer Roboter für 1.000 Euro pro Woche
Der Robo Operator ist bereits im Einsatz und kann von Unternehmen gebucht werden. Der Fokus von Robo liegt nicht darauf, die Fachkraft dauerhaft zu ersetzen, sondern von Unternehmen für eine bestimmte Zeit ausgeliehen zu werden. Auf Wunsch kann der Roboter aber auch dauerhaft erworben werden. Obwohl für KMUs entwickelt, gibt es inzwischen auch einige Anfragen von Großunternehmen.
Als Basismietpreis berechnet IP etwa 1.000 Euro pro Woche, 3.500 Euro pro Monat und pro Quartal 8.000 Euro. Dazu kommen noch Kosten für Anlieferung, Einrichtung und mehr.
Was der Robo Operator kann
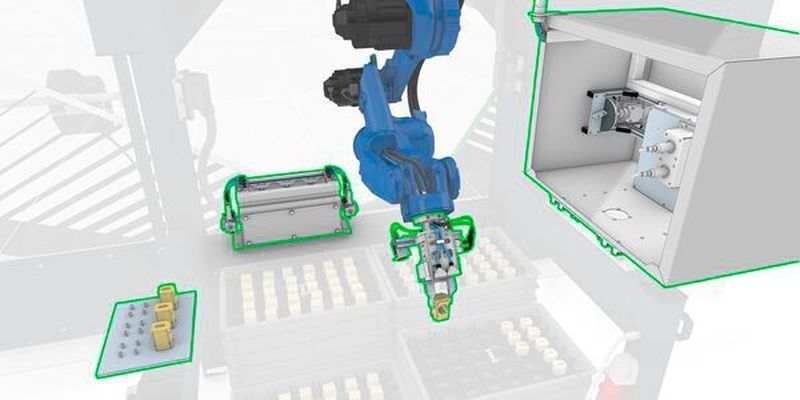
Der Robo Operator besteht aus einer manuell verfahrbaren Zelle mit eingebautem Industrieroboter, einem integrierten Werkstückpuffersystem und einem Kamerasystem. Der Robo Operator wird direkt vor die zu bedienende Werkzeugmaschine gestellt und arbeitet dann eigenständig genau die Arbeitsschritte ab, die sonst von der Fachkraft ausgeführt werden. Er kann beispielsweise die Maschine be- und entladen, das Spannsystem steuern, entrgraten oder das Programm starten und beenden.
:quality(80)/images.vogel.de/vogelonline/bdb/1741200/1741240/original.jpg "(IP)")
:quality(80)/images.vogel.de/vogelonline/bdb/1741700/1741712/original.jpg "(IP)")
:quality(80)/images.vogel.de/vogelonline/bdb/1741700/1741713/original.jpg "(IP)")
:quality(80)/images.vogel.de/vogelonline/bdb/1741700/1741714/original.jpg "(IP)")
Und das funktioniert so: Der Robo erkennt seine Position vor der Werkzeugmaschine mithilfe eines integrierten Kamerasystems. Damit kann er z.B. auch die Signalsäule richtig interpretieren, die den Maschinenzustand anzeigt. Er kann mit verschiedenen Greifern arbeiten oder für spezielle Bearbeitungsschritte ausgerüstet werden. Erlernte Fähigkeiten speichert Robo in seiner Datenbank ab, sodass er Arbeitsschritte wiederholen kann.
Robo kann Umgebung interpretieren
Damit Robo Aufgaben lernt, muss er nicht mit der Werkzeugmaschine über Hard- oder Software gekoppelt werden. Die Wissenschaftler des Fraunhofer IWU wollten dem Roboter die nötigen kognitiven Fähigkeiten mitgeben, dass er aus seiner Umgebung die richtigen Schlüsse ziehen kann. Dazu entwickelten sie die Steuerungssoftware für die Automatisierung und Auswertung der Bildinformationen.
Ein fähigkeitsbasiertes Steuerungskonzept kann die Programmabläufe flexibel zusammenstellen. Und die Analysealgorithmen sind so entwickelt, dass sie unter verschiedenen Lichtbedingungen funktionieren.
(ID:46838571)
:quality(80)/p7i.vogel.de/wcms/2d/ad/2dada3bf7d33f87c4b92837638516de6/0127181082v2.jpeg "Wenn Stellen unbesetzt bleiben, springen Kollegen ein, übernehmen fachfremde Aufgaben oder verlängern ihre Arbeitszeit. Die Folgen: Ermüdung und Unzufriedenheit steigen, die Produktivität sinkt. (Bild: © Anna Syvak - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/5c/3f/5c3f7136e54f8ee9db068ab2adf2c25f/0129795613v1.jpeg "Eine Kameraprüfung bei der Entnahme sorgt dafür, dass die Bauteile in den KLTs korrekt platziert werden. (Bild: Yaskawa Europe )")