:quality(80)/p7i.vogel.de/wcms/61/71/617123e3846b0079e580895c5bc37d40/2-995x560v1.png "Das Forschungsteam an der TU München misst und regelt die Sehnenkräfte an dem Roboter. Das Ziel des Forschungsprojekts sind neuartige Regelungskonzepte. (Bild: TU München)")
:quality(80)/p7i.vogel.de/wcms/d5/09/d5091cd9a582aa0f780740ec4faac973/0130381601v2.jpeg "Die Besucher freuten sich vor allem über das vielfältige Programm. (Bild: Stefan Bausewein/VCG)")
:quality(80)/p7i.vogel.de/wcms/b6/f5/b6f57042111d87f229188016760aa9be/0130112613v2.jpeg "„Den Teilnehmern werden auch Strategien vorgestellt, wie sie nicht nur gesetzliche Vorgaben erfüllen, sondern auch Innovationsführer in ihrem Sektor werden können“, so Michelle Duerksen, Sustainability Sales Manager bei Schneider Electric. (Bild: Schneider Electric)")
:quality(80)/p7i.vogel.de/wcms/02/ba/02baa569447a740c8090977765087852/0129990653v1.jpeg "Michelle Duerksen (Sustainability Sales Manager Schneider Electric, links oben), Jens Müller (Geschäftsführung Müller und Partner Sachverständige, links unten). Von rechts oben nach unten: Benjamin Zierold (Geschäftsführer Koenig & Bauer), Wolfgang Wiedemann (Director Murrelektronik) und Thomas Droth (Head of Industry Solutions Mitsubishi Electric). (Bild: Schneider Electric, Laura Boysen/Müller und Partner Sachverständige, Murrelektronik, König & Bauer, Mitsubishi Electric)")
:quality(80)/p7i.vogel.de/wcms/d0/8a/d08a5613344a1f42f0673eb88086e3c0/siemens-intelligence-center-x-2276x1280v1.jpeg "Durch die Verbindung von Daten, Modellen und Arbeitsabläufen auf einer einzigen, verwalteten Grundlage soll Intelligence Center X es ermöglichen, KI-gesteuerte Anwendungen und Agenten schneller bereitzustellen. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/81/05/8105ef585e5da37701630955e4a86176/adobestock-1988290392--c2-a9-20digitalspace-20-e2-80-93-20stock-adobe-com-ki-generiert-4096x2305v1.jpeg "Ziel des Projekts war es, Produktionsabläufe energieoptimiert zu steuern, entstehende Emissionen einzelnen Produkten zuzuordnen und industrielle Prozesse stärker an die Verfügbarkeit erneuerbarer Energien anzupassen, um CO₂-Ausstoß und Energiekosten zu reduzieren. (Bild: © DigitalSpace – stock.adobe.com_KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/e5/33/e533f533e51ba60b0db4861c36101816/adobestock-939092274--c2-a9-20kamonwan-20-e2-80-93-20stock-adobe-com-ki-generiert-5798x3264v1.jpeg "Wissen per Knopfdruck: KI-basierte Assistenzsysteme wie der 8D-Assist machen Expertenwissen verfügbar. (Bild: Kamonwan – stock.adobe.com_KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/ef/a5/efa5c03f3c458a905668e4c8f9a12222/batterie-adobestock-1957383478-visionary-generiert-mit-ki-8190x4608v1.jpeg "Das Wachstum der deutschen Batterieindustrie wird primär von zwei industriellen Megatrends gestützt: dem anhaltenden Hochlauf der Elektromobilität sowie einer massiven Nachfrage nach stationären Speichersystemen. (Bild: AdobeStock_Visionary / generiert-mit-KI)")
:quality(80)/p7i.vogel.de/wcms/b6/39/b639721a14f3ed4af8bcd6b983cd26fe/recom-2465x1387v1.png "Die Racpro1-Familie endet nicht beim AC/DC-Netzteil. Sie wird durch Redundanzmodule und elektronische Schutzschalter ergänzt. (Bild: Recom)")
:quality(80)/p7i.vogel.de/wcms/e0/74/e074ee9c173a776a35d2616c57bbe4e6/bild-3-1248x702v1.png "Die Mink Rack-Brush wurde u.a. in einem Stengel Server-Rack verbaut. (Bild: Mink Bürsten)")
:quality(80)/p7i.vogel.de/wcms/ec/7c/ec7c56fc015d6fb8982ae82ec6c8cb9b/0131835086v2.jpeg "Die drei Säulen der Metrologie: wissenschaftlich, industriell, gesetzlich. (Bild: GTM GmbH)")
:quality(80)/p7i.vogel.de/wcms/e5/d5/e5d525f02f68ed8cde95b3405acffb0b/0131816272v2.jpeg "Jan Markvart testet das Ketop Safe Wireless in der Produktion. (Bild: Keba Industrial Automation GmbH)")
:quality(80)/p7i.vogel.de/wcms/d0/b5/d0b58f53bf0d4ed804d3b255b863c326/0131673194v2.jpeg "Die grundlegenden technischen DPP-Standards schaffen Transparenz für
Verbraucher, Industrie und Behörden. (Bild: © ImageFlow - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/09/81/0981a58a68530db70d8d67ec13d1c823/adobestock-96039220--c2-a9-203dsculptor-20--20stock-adobe-com-6000x3375v1.jpeg "Anwendungen, die im Weltall eingesetzt werden, stellen höchste Anforderungen an Antriebe. (Bild: © 3dsculptor - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/ea/9e/ea9e4f2c125ec5104c325e471be60efe/0131632764v2.jpeg "Stefan Huber (Head of Research, FH Salzburg) und Martin Haidacher (Innovation Manager, B&R) gemeinsam mit Technik von B&R
(Bild: B&R Industrie-Elektronik GmbH)")
:quality(80)/p7i.vogel.de/wcms/30/fe/30fed694c422d9fa70be1def67df9e96/0131594908v2.jpeg "Nord hat unter anderem die dezentralen Frequenzumrichter der Nordac-On-Familie mit neuen Funktionen im Bereich der Funktionalen Sicherheit ausgestattet. (Bild: Nord Drivesystems)")
:quality(80)/p7i.vogel.de/wcms/35/21/35215b04eac3455313ca51b72792c041/max-6-1080x608v1.png "IPF Electronic hat für das Unternehmen und alle Mitarbeiter eigene verbindliche Richtlinien für die Nutzung Künstlicher Intelligenz erarbeitet. (Bild: IPF Electronic)")
:quality(80)/p7i.vogel.de/wcms/bb/3a/bb3a3e3e2325113eb1ed97c5002a202f/-28c-29designbyfreepik2-5376x3022v1.jpeg "Humanoide Roboter könnten bereits in den kommenden zehn Jahren zu einem der wichtigsten Werkzeuge der modernen Industrie- und Dienstleistungsgesellschaft werden. (Bild: FreePik2)")
:quality(80)/p7i.vogel.de/wcms/9f/88/9f8886e390fea5f026a89ef164f7d6b6/david-reger-neura-product-family-4048x2277v1.jpeg "„Wir sind überzeugt, dass Physical AI und kognitive Robotik zu einem der größten Technologiesprünge der kommenden Jahrzehnte führen werden“, David Reger, Gründer und CEO von Neura Robotics (Bild: Neura Robotics)")
:quality(80)/p7i.vogel.de/wcms/56/e8/56e8e3795f0143046743769c710be5dd/newsimage422125-1776x1000v1.jpeg "Der Scout Rover des DLR im Einsatz im Kammstollen am Schneefernerhaus. (Bild: Erlend Hellerslien / DLR)")
:quality(80)/p7i.vogel.de/wcms/56/7b/567b3d4b554a1dbdcf835918350c021a/symbolbild-wahrnehmung-ki-1364x768v1.jpeg "KI-Modelle verarbeiten visuelle Informationen oft fragmentiert – neue Trainingsansätze setzen hier an. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/e3/c6/e3c68f83504c098804f49c6c0ab68afa/trucks-with-vipv-on-bridge-5472x3076v1.jpeg "Insbesondere Lieferwagen, Lkw und Anhänger verfügen über viel Dachfläche und verbrauchen gleichzeitig viel Energie für Kühlung, Heizung und Hilfsaggregate. Integrierte Solarmodule sind sinnvolle Lösung. (Bild: IM Efficiency)")
:quality(80)/p7i.vogel.de/wcms/a0/03/a003d1d5ee83399f232303f7c50bd93b/geralt-statistics-4623842-4752x2672v1.jpeg "Erholung mit Risiken: Deutschlands Wirtschaft zwischen geopolitischer Unsicherheit und technologischem Aufschwung. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/68/89/6889ce824f7362d1ee31c6114039849d/0131677915v2.jpeg "Nur menschliche Empathie schafft echte Beziehungen. Führungskräfte, die Hoffnung vermitteln und Vertrauen im Alltag leben, verwandeln Risiken automatisierter Entscheidungen in Chancen, die Organisation und Mitarbeitende gleichermaßen stärken. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/ed/02/ed02ce464ed1a39dcd7a617f55a4ffc1/0131677386v2.jpeg "Durch das Nutzen von KI gewinnen Führungskräfte Zeit für Entwicklungsgespräche, Perspektivenarbeit und persönliche Begleitung. Diese menschliche und persönliche Zuwendung signalisiert Mitarbeitern Wertschätzung und eröffnet Zukunftschancen. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/7d/df/7ddf9467a9acc812e8cc29324c3b080e/0131729703v2.jpeg "Zu viele verschiedene Varianten machen das Handling unübersichtlich. Denn ein geändertes Bauteil betrifft nicht nur eine Stückliste, sondern zieht Anpassungen in Prüfplänen, Dokumentation, Parametrierung und Ersatzteillogik nach sich. (Bild: © Radoman Durkovic - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/6c/66/6c6647dd81976d2c940f9514ec01f02a/schraub-20tec-074-3000x1687v1.jpeg "Der fachliche Austausch ist das, was die Regionalmesse Schraubtec ausmacht. (Bild: PHOTOVISION-DH )")
:quality(80)/p7i.vogel.de/wcms/58/63/586379bda19d8f06e6015cecb41a4967/kampagnenbild-1947x1095v1.png "(Bild: ANSYS Germany GmbH )")
:quality(80)/p7i.vogel.de/wcms/d1/12/d112dfa6e7df4c7af715a4833483f659/0126977441v1.jpeg "DIN RAIL SMART PROTECTION: RACPRO1 E-FUSE MODULE (Bild: RECOM Power GmbH)")
Open Source 3D-gedruckter Roboterbausatz für die Grundlagenforschung
Der dynamische, 3D-gedruckte Roboter Solo 8 basiert auf einem Open-Source-Bausatz, der Universitäten weltweit zur Verfügung steht. Er kann leicht nachgebaut werden und eignet sich damit ideal für die Grundlagenforschung.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/114400/114404/65.jpg "SABLogo-special cables.jpg ()")
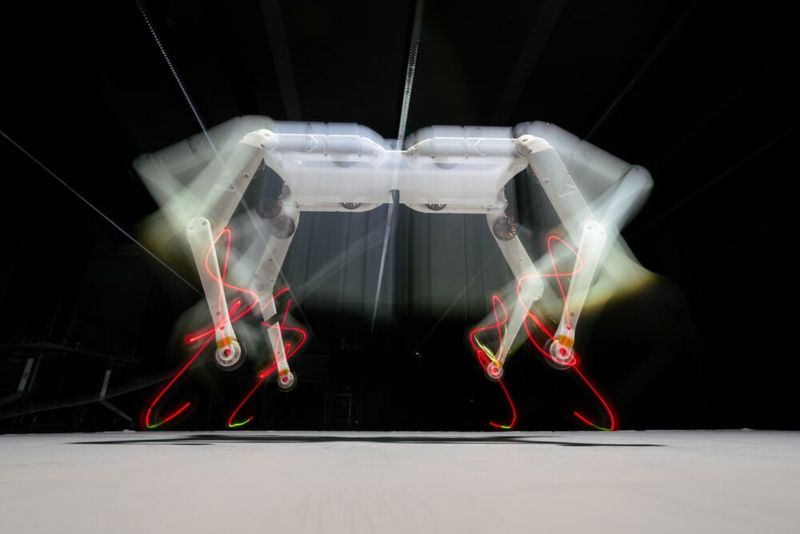
Solo 8, ein dynamischer, vierbeiniger Roboter aus dem 3D-Drucker, ist von Wissenschaftlern des Max-Planck-Instituts für Intelligente Systeme zusammen mit der New York University entwickelt worden. Der agile Roboter basiert auf einem Open-Source-Bausatz, um die Technologie jedem Robotik-Forschungslabor zur Verfügung zu stellen. Damit sollen Robotiker weltweit Algorithmen austauschen, Methoden vergleichen und Erkenntnisse teilen können.
Roboter kann hüpfen und aufstehen
Der vierbeinige Roboter ist mit zwei Kilogramm sehr leicht, die meisten vierbeinigen Roboter sind deutlich schwerer. Er ist drehmomentgesteuert und eignet sich für hochdynamische Bewegungen. So kann Solo 8 über 40 Zentimeter hoch springen, oder nach dem Umkippen von alleine wieder auf die Beine kommen. Die Zahl in seinem Namen verweist auf die Anzahl an Gelenken, die verbaut sind: Jedes Roboterbein kann die Winkel in Hüfte und Knie verändern.
Eine Forschungsgruppe, die einen solchen Roboter selbst entwickeln würde, bräuchte dafür etwa vier Jahre.
Zudem federt der Roboter einen Sprung ab. Die drehmomentgesteuerten Motoren verhalten sich dabei wie die Muskeln in Tierbeinen oder wie elastischen Sehnen. Solo 8 verwendet virtuelle Federn, keine mechanischen, die programmierbar sind. Somit kann die Federsteifigkeit von weich bis hart eingestellt werden.
Open-Source-Bausatz weltweit verfügbar

Wichtig war dem Team neben der dynamischen Bewegung vor allem, dass der Roboter nicht zu teuer und leicht replizierbar ist. Sie wollten eine leicht zugängliche und erschwingliche Plattform für Forschung und Lehre im Bereich der Fortbewegung entwickeln. Die meisten Teile, aus denen Solo 8 besteht, werden 3D-gedruckt. Die restlichen Bauteile kann man zukaufen. Die Konstruktionsanleitung und die GitHub-Dokumentation sind Open Source unter der BSD 3-Lizenz veröffentlicht. Damit sollen andere Wissenschaftler eigene Prototypen und Technologien auf Basis von Solo 8 entwickeln können.
Alexander Badri-Spröwitz, Leiter der Forschungsgruppe Dynamische Lokomotion am MPI-IS erklärt die Vorteile von Solo 8: „Die Plattform ist das kombinierte Wissen mehrerer Teams. Jetzt kann jedes Robotiklabor der Welt online gehen, die Dateien herunterladen, die Teile 3D-ausdrucken und die restlichen Komponenten zukaufen. Robotiker können innerhalb weniger Wochen zusätzliche Funktionen hinzufügen. Und schon haben sie einen Weltklasse-Roboter.“
Vor kurzem wurde eine neue Version fertiggestellt und erste Tests mit mehr Freiheitsgraden durchgeführt: insgesamt zwölf, drei pro Bein. Der Solo 12 kann sich nun auch seitwärts bewegen.
(ID:46655101)
:quality(80)/p7i.vogel.de/wcms/ee/1b/ee1bf8fb4b4ff596a82e22513fab5c16/0126917674v1.jpeg "Forscher stellen eine neue Methode vor, mit der sie die Magnetisierung kleiner Roboter neu ausrichten können - dazu werden die magnetischen Röhrchen wie Matroschka-Puppen ineinander gestapelt. (Bild: © Dmitry - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/dd/94/dd94e71da325788b2a5995cb31c36018/0127564528v1.jpeg "Magnetisches Jamming eröffnet neue Möglichkeiten für die Mikrorobotik. (Bild: MPI-IS)")