:quality(80)/p7i.vogel.de/wcms/61/71/617123e3846b0079e580895c5bc37d40/2-995x560v1.png "Das Forschungsteam an der TU München misst und regelt die Sehnenkräfte an dem Roboter. Das Ziel des Forschungsprojekts sind neuartige Regelungskonzepte. (Bild: TU München)")
:quality(80)/p7i.vogel.de/wcms/d5/09/d5091cd9a582aa0f780740ec4faac973/0130381601v2.jpeg "Die Besucher freuten sich vor allem über das vielfältige Programm. (Bild: Stefan Bausewein/VCG)")
:quality(80)/p7i.vogel.de/wcms/b6/f5/b6f57042111d87f229188016760aa9be/0130112613v2.jpeg "„Den Teilnehmern werden auch Strategien vorgestellt, wie sie nicht nur gesetzliche Vorgaben erfüllen, sondern auch Innovationsführer in ihrem Sektor werden können“, so Michelle Duerksen, Sustainability Sales Manager bei Schneider Electric. (Bild: Schneider Electric)")
:quality(80)/p7i.vogel.de/wcms/02/ba/02baa569447a740c8090977765087852/0129990653v1.jpeg "Michelle Duerksen (Sustainability Sales Manager Schneider Electric, links oben), Jens Müller (Geschäftsführung Müller und Partner Sachverständige, links unten). Von rechts oben nach unten: Benjamin Zierold (Geschäftsführer Koenig & Bauer), Wolfgang Wiedemann (Director Murrelektronik) und Thomas Droth (Head of Industry Solutions Mitsubishi Electric). (Bild: Schneider Electric, Laura Boysen/Müller und Partner Sachverständige, Murrelektronik, König & Bauer, Mitsubishi Electric)")
:quality(80)/p7i.vogel.de/wcms/d0/8a/d08a5613344a1f42f0673eb88086e3c0/siemens-intelligence-center-x-2276x1280v1.jpeg "Durch die Verbindung von Daten, Modellen und Arbeitsabläufen auf einer einzigen, verwalteten Grundlage soll Intelligence Center X es ermöglichen, KI-gesteuerte Anwendungen und Agenten schneller bereitzustellen. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/81/05/8105ef585e5da37701630955e4a86176/adobestock-1988290392--c2-a9-20digitalspace-20-e2-80-93-20stock-adobe-com-ki-generiert-4096x2305v1.jpeg "Ziel des Projekts war es, Produktionsabläufe energieoptimiert zu steuern, entstehende Emissionen einzelnen Produkten zuzuordnen und industrielle Prozesse stärker an die Verfügbarkeit erneuerbarer Energien anzupassen, um CO₂-Ausstoß und Energiekosten zu reduzieren. (Bild: © DigitalSpace – stock.adobe.com_KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/e5/33/e533f533e51ba60b0db4861c36101816/adobestock-939092274--c2-a9-20kamonwan-20-e2-80-93-20stock-adobe-com-ki-generiert-5798x3264v1.jpeg "Wissen per Knopfdruck: KI-basierte Assistenzsysteme wie der 8D-Assist machen Expertenwissen verfügbar. (Bild: Kamonwan – stock.adobe.com_KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/ef/a5/efa5c03f3c458a905668e4c8f9a12222/batterie-adobestock-1957383478-visionary-generiert-mit-ki-8190x4608v1.jpeg "Das Wachstum der deutschen Batterieindustrie wird primär von zwei industriellen Megatrends gestützt: dem anhaltenden Hochlauf der Elektromobilität sowie einer massiven Nachfrage nach stationären Speichersystemen. (Bild: AdobeStock_Visionary / generiert-mit-KI)")
:quality(80)/p7i.vogel.de/wcms/b6/39/b639721a14f3ed4af8bcd6b983cd26fe/recom-2465x1387v1.png "Die Racpro1-Familie endet nicht beim AC/DC-Netzteil. Sie wird durch Redundanzmodule und elektronische Schutzschalter ergänzt. (Bild: Recom)")
:quality(80)/p7i.vogel.de/wcms/e0/74/e074ee9c173a776a35d2616c57bbe4e6/bild-3-1248x702v1.png "Die Mink Rack-Brush wurde u.a. in einem Stengel Server-Rack verbaut. (Bild: Mink Bürsten)")
:quality(80)/p7i.vogel.de/wcms/ec/7c/ec7c56fc015d6fb8982ae82ec6c8cb9b/0131835086v2.jpeg "Die drei Säulen der Metrologie: wissenschaftlich, industriell, gesetzlich. (Bild: GTM GmbH)")
:quality(80)/p7i.vogel.de/wcms/e5/d5/e5d525f02f68ed8cde95b3405acffb0b/0131816272v2.jpeg "Jan Markvart testet das Ketop Safe Wireless in der Produktion. (Bild: Keba Industrial Automation GmbH)")
:quality(80)/p7i.vogel.de/wcms/d0/b5/d0b58f53bf0d4ed804d3b255b863c326/0131673194v2.jpeg "Die grundlegenden technischen DPP-Standards schaffen Transparenz für
Verbraucher, Industrie und Behörden. (Bild: © ImageFlow - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/09/81/0981a58a68530db70d8d67ec13d1c823/adobestock-96039220--c2-a9-203dsculptor-20--20stock-adobe-com-6000x3375v1.jpeg "Anwendungen, die im Weltall eingesetzt werden, stellen höchste Anforderungen an Antriebe. (Bild: © 3dsculptor - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/ea/9e/ea9e4f2c125ec5104c325e471be60efe/0131632764v2.jpeg "Stefan Huber (Head of Research, FH Salzburg) und Martin Haidacher (Innovation Manager, B&R) gemeinsam mit Technik von B&R
(Bild: B&R Industrie-Elektronik GmbH)")
:quality(80)/p7i.vogel.de/wcms/30/fe/30fed694c422d9fa70be1def67df9e96/0131594908v2.jpeg "Nord hat unter anderem die dezentralen Frequenzumrichter der Nordac-On-Familie mit neuen Funktionen im Bereich der Funktionalen Sicherheit ausgestattet. (Bild: Nord Drivesystems)")
:quality(80)/p7i.vogel.de/wcms/35/21/35215b04eac3455313ca51b72792c041/max-6-1080x608v1.png "IPF Electronic hat für das Unternehmen und alle Mitarbeiter eigene verbindliche Richtlinien für die Nutzung Künstlicher Intelligenz erarbeitet. (Bild: IPF Electronic)")
:quality(80)/p7i.vogel.de/wcms/bb/3a/bb3a3e3e2325113eb1ed97c5002a202f/-28c-29designbyfreepik2-5376x3022v1.jpeg "Humanoide Roboter könnten bereits in den kommenden zehn Jahren zu einem der wichtigsten Werkzeuge der modernen Industrie- und Dienstleistungsgesellschaft werden. (Bild: FreePik2)")
:quality(80)/p7i.vogel.de/wcms/9f/88/9f8886e390fea5f026a89ef164f7d6b6/david-reger-neura-product-family-4048x2277v1.jpeg "„Wir sind überzeugt, dass Physical AI und kognitive Robotik zu einem der größten Technologiesprünge der kommenden Jahrzehnte führen werden“, David Reger, Gründer und CEO von Neura Robotics (Bild: Neura Robotics)")
:quality(80)/p7i.vogel.de/wcms/56/e8/56e8e3795f0143046743769c710be5dd/newsimage422125-1776x1000v1.jpeg "Der Scout Rover des DLR im Einsatz im Kammstollen am Schneefernerhaus. (Bild: Erlend Hellerslien / DLR)")
:quality(80)/p7i.vogel.de/wcms/56/7b/567b3d4b554a1dbdcf835918350c021a/symbolbild-wahrnehmung-ki-1364x768v1.jpeg "KI-Modelle verarbeiten visuelle Informationen oft fragmentiert – neue Trainingsansätze setzen hier an. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/e3/c6/e3c68f83504c098804f49c6c0ab68afa/trucks-with-vipv-on-bridge-5472x3076v1.jpeg "Insbesondere Lieferwagen, Lkw und Anhänger verfügen über viel Dachfläche und verbrauchen gleichzeitig viel Energie für Kühlung, Heizung und Hilfsaggregate. Integrierte Solarmodule sind sinnvolle Lösung. (Bild: IM Efficiency)")
:quality(80)/p7i.vogel.de/wcms/a0/03/a003d1d5ee83399f232303f7c50bd93b/geralt-statistics-4623842-4752x2672v1.jpeg "Erholung mit Risiken: Deutschlands Wirtschaft zwischen geopolitischer Unsicherheit und technologischem Aufschwung. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/68/89/6889ce824f7362d1ee31c6114039849d/0131677915v2.jpeg "Nur menschliche Empathie schafft echte Beziehungen. Führungskräfte, die Hoffnung vermitteln und Vertrauen im Alltag leben, verwandeln Risiken automatisierter Entscheidungen in Chancen, die Organisation und Mitarbeitende gleichermaßen stärken. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/ed/02/ed02ce464ed1a39dcd7a617f55a4ffc1/0131677386v2.jpeg "Durch das Nutzen von KI gewinnen Führungskräfte Zeit für Entwicklungsgespräche, Perspektivenarbeit und persönliche Begleitung. Diese menschliche und persönliche Zuwendung signalisiert Mitarbeitern Wertschätzung und eröffnet Zukunftschancen. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/7d/df/7ddf9467a9acc812e8cc29324c3b080e/0131729703v2.jpeg "Zu viele verschiedene Varianten machen das Handling unübersichtlich. Denn ein geändertes Bauteil betrifft nicht nur eine Stückliste, sondern zieht Anpassungen in Prüfplänen, Dokumentation, Parametrierung und Ersatzteillogik nach sich. (Bild: © Radoman Durkovic - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/6c/66/6c6647dd81976d2c940f9514ec01f02a/schraub-20tec-074-3000x1687v1.jpeg "Der fachliche Austausch ist das, was die Regionalmesse Schraubtec ausmacht. (Bild: PHOTOVISION-DH )")
:quality(80)/p7i.vogel.de/wcms/58/63/586379bda19d8f06e6015cecb41a4967/kampagnenbild-1947x1095v1.png "(Bild: ANSYS Germany GmbH )")
:quality(80)/p7i.vogel.de/wcms/d1/12/d112dfa6e7df4c7af715a4833483f659/0126977441v1.jpeg "DIN RAIL SMART PROTECTION: RACPRO1 E-FUSE MODULE (Bild: RECOM Power GmbH)")
Unterwasserfahrzeug Autonomes U-Boot taucht erstmals ab
Das Autonomous Underwater Vehicle (AUV) "Aegir" hat seinen ersten Tauchgang – ohne Steuerung von außen – erfolgreich in einem Schwimmbad absolviert. Das autonome U-Boot wurde von Forschern des Helmholtz-Zentrums für Ozeanforschung Kiel (Geomar) für die küstennahe Erkundung von Meeresböden entwickelt. Es kann bis in eine Tiefe von 200 m tauchen und einen zuvor festgelegten Kurs abfahren.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/113800/113818/65.jpg "Turck_Your_Global_Automation_Partner.jpg ()")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/69500/69582/65.jpg "mc_logo_600dpi.jpg ()")
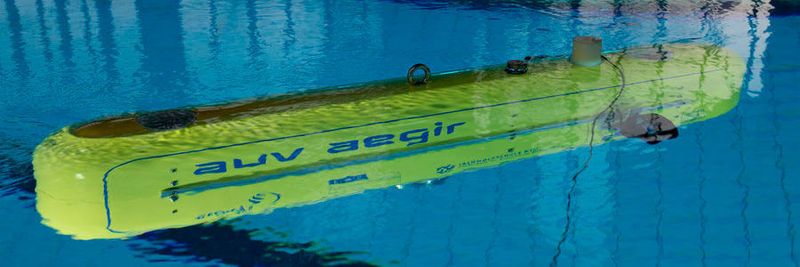
Die Forscher des Helmholtz-Zentrums für Ozeanforschung Kiel (Gemar) haben ihr selbst entwickeltes autonomes Unterwasserfahrzeug AUV Aegir erstmals in einem Schwimmbad auf Tauchstation geschickt. In der Versuchsphase wurde die autonome Manövrierfähigkeit des AUV Aegir erfolgreich getestet. Schon bald soll sich das autonome U-Boot in Wassertiefen bis maximal 200 m frei durchs Meerwasser bewegen. Der Haupt-Sensor ist eine auf den Meeresboden gerichtete Kamera und ein Blitzlicht, bestehend aus zwei LEDs. Diese sogenannte Machine-Vision-Kamera ist mit dem entsprechenden Objektiv fest in einem Druckkörper installiert. Die Kamera hat einen eigenen Rechner und eine Verbindung zum Haupt-Computer des Fahrzeugs. Des Weiteren gibt es einen akustischen Doppler-Geschwindigkeits-Messer, einen kombinierten Druck- und Schallgeschwindigkeits-Sensor sowie insgesamt vier Antriebe bzw. Propeller.
:quality(80)/images.vogel.de/vogelonline/bdb/1351800/1351847/original.jpg "(Geomar/Lukas Wernicke)")
:quality(80)/images.vogel.de/vogelonline/bdb/1351800/1351848/original.jpg "(Geomar/Lukas Wernicke)")
:quality(80)/images.vogel.de/vogelonline/bdb/1351800/1351851/original.jpg "(Geomar/Emanuel Wenzlaff)")
Aegir ist ungeachtet der Bedeutung des Namens, der "Riese der See", mit einer Länge von rund eineinhalb Metern und einer Höhe von 50 cm so ausgelegt, dass das Gefährt ohne großen logistischen Aufwand zu allen Einsatzgebieten gebracht werden kann, etwa nach Umweltkatastrophen. Es wurde so konzipiert, dass es den rauen Bedingungen in Ost- und vor allem Nordsee widersteht. Angetrieben wird es von vier Propellern, die elektrisch angetrieben werden. Das hilft, wichtige Ziele zu erreichen. Das AUV kann auch bei geringen Geschwindigkeiten stabil tauchen und navigieren. „Wir wollten bei dem kontrollierten Tauchgang in erster Linie die Steuerung testen beziehungsweise die richtigen Werte für die Geschwindigkeitsregelung finden. Diese Werte müssen speziell auf das Fahrzeug und auf dessen Fahrverhalten abgestimmt sein“, erklärt Software-Ingenieur Nikolaj Diller vom Geomar.
:quality(80)/images.vogel.de/vogelonline/bdb/1317000/1317072/original.jpg "Gerade fertig zusammengesetzt und kurz vor dem Transport zum Feldtest in Nordspanien: Ein „Great Diver“, eine der Tauchdrohnen des Teams Arggonauts. (Fraunhofer IOSB)")
Tiefsee-Roboter
Richtige Optik sorgt für scharfe Fotos aus der Tiefsee
Das AUV Aegir wurde bis auf die Sensorik im Technik- und Logistikzentrum des Geomar konzipiert, konstruiert, gefertigt und montiert. Mehr als 10 Mitarbeiter und Studenten waren zeitweise an diesem Projekt beteiligt. Die Software-Architektur des Fahrzeugs kommt von der Firma IQUA-Robotics (Girona, Spanien), die auch die im Rahmen des Projektes MOSES (HGF Erde und Umwelt Investitionsprogramm) beschafften Unterwasser-Fahrzeuge vom Typ Girona 500 liefert. Damit ist das Testen und Einsetzen vom AUV Aegir ein vorbereitender Schritt für dieses Projekt bzw. dieser Unterwasserfahrzeuge.
Steuerung von außen: Autonomes Tauchen will gelernt sein
Seit Ende 2015 arbeitet die AUV-Gruppe des Geomar zusammen weiteren Technikerinnen und Technikern des Technik- und Logistikzentrums am AUV Aegir, dessen mechanische Fertigung Ende Sommer 2017 abgeschlossen wurde. Erste Tauchgänge absolvierte das Gerät bereits im Herbst 2017. „Dabei war es aber immer noch durch ein Kabel mit der Steuerung verbunden. Geplant war jedoch, dass Aegir ohne Fernsteuerung unter Wasser agieren kann“, erklärt Marcel Rothenbeck, Leiter der Geomar-AUV-Gruppe.Die jetzt getestete Fahrzeugregelung ist ein Bestandteil der Kontroll-Software des AUVs. „Für uns ist dies eine gute Vorbereitung, da wir im Rahmen des Umweltmonitoring-Projekts MOSES zwei AUVs vom Typ GIRONA500 einsetzen werden und die Software jetzt schon an unserem eigenen AUV ausprobieren können “, sagt Rothenbeck.
:quality(80)/images.vogel.de/vogelonline/bdb/1278600/1278636/original.jpg "Unbemannte U-Boote schneller aufladen: Die US-Navy arbeitet für ihre Tauchroboter, sogenannte Unmanned Undersea Vehicles (UUV), an einer drahtlosen Unterwasser-Ladestation. (US-Navy)")
Induktive Ladetechnik
Drahtlose Ladestation für Tauchroboter entwickelt
Tauchgang ohne Nabelschnur
Für den Test im Uni-Schwimmbecken definierte das AUV-Team ein kleines Viereck innerhalb des Beckens anhand von Wegpunkten, die vom AUV abgefahren werden sollten. Das Fahrzeug tauchte ab, erreichte die vorgegebene Tiefe und fuhr die Wegpunkte ab. Am Ende des Tauchgangs, tauchte das Fahrzeug auf und stoppte die Antriebe. „Von außen sah das ganz unspektakulär aus. Für uns war das aber ein schöner Moment, immerhin war das Aegirs erster autonomer Tauchgang ohne ,Nabelschnur‘“, so Rothenbeck.
Natürlich müssen noch weitere Tests durchgeführt werden, bis das neue Gerät ins Meer entlassen wird. „Aber wir sind auf dem richtigen Weg. Was wir nun brauchen ist eine verlässliche und reproduzierbare Positionierung“, so Rothenbeck.
(ID:45130781)
:quality(80)/p7i.vogel.de/wcms/6d/d9/6dd9069effd67aff43f134f04f84a2a9/0131652645v2.jpeg "Der lüfterlose Industrie Embedded PC namens Rocksmart RSX1000 (Bild: Werock)")
:quality(80)/p7i.vogel.de/wcms/48/5d/485d13da923de63c8478ed448f7afffc/0125252394v3.jpeg "Einfach installiert und schnell amortisiert ermöglicht der Rebel Move den kostengünstigen Einstieg in die Automatisierung von Logistikprozessen. (Bild: Igus)")