:quality(80)/p7i.vogel.de/wcms/61/71/617123e3846b0079e580895c5bc37d40/2-995x560v1.png "Das Forschungsteam an der TU München misst und regelt die Sehnenkräfte an dem Roboter. Das Ziel des Forschungsprojekts sind neuartige Regelungskonzepte. (Bild: TU München)")
:quality(80)/p7i.vogel.de/wcms/d5/09/d5091cd9a582aa0f780740ec4faac973/0130381601v2.jpeg "Die Besucher freuten sich vor allem über das vielfältige Programm. (Bild: Stefan Bausewein/VCG)")
:quality(80)/p7i.vogel.de/wcms/b6/f5/b6f57042111d87f229188016760aa9be/0130112613v2.jpeg "„Den Teilnehmern werden auch Strategien vorgestellt, wie sie nicht nur gesetzliche Vorgaben erfüllen, sondern auch Innovationsführer in ihrem Sektor werden können“, so Michelle Duerksen, Sustainability Sales Manager bei Schneider Electric. (Bild: Schneider Electric)")
:quality(80)/p7i.vogel.de/wcms/02/ba/02baa569447a740c8090977765087852/0129990653v1.jpeg "Michelle Duerksen (Sustainability Sales Manager Schneider Electric, links oben), Jens Müller (Geschäftsführung Müller und Partner Sachverständige, links unten). Von rechts oben nach unten: Benjamin Zierold (Geschäftsführer Koenig & Bauer), Wolfgang Wiedemann (Director Murrelektronik) und Thomas Droth (Head of Industry Solutions Mitsubishi Electric). (Bild: Schneider Electric, Laura Boysen/Müller und Partner Sachverständige, Murrelektronik, König & Bauer, Mitsubishi Electric)")
:quality(80)/p7i.vogel.de/wcms/d0/8a/d08a5613344a1f42f0673eb88086e3c0/siemens-intelligence-center-x-2276x1280v1.jpeg "Durch die Verbindung von Daten, Modellen und Arbeitsabläufen auf einer einzigen, verwalteten Grundlage soll Intelligence Center X es ermöglichen, KI-gesteuerte Anwendungen und Agenten schneller bereitzustellen. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/81/05/8105ef585e5da37701630955e4a86176/adobestock-1988290392--c2-a9-20digitalspace-20-e2-80-93-20stock-adobe-com-ki-generiert-4096x2305v1.jpeg "Ziel des Projekts war es, Produktionsabläufe energieoptimiert zu steuern, entstehende Emissionen einzelnen Produkten zuzuordnen und industrielle Prozesse stärker an die Verfügbarkeit erneuerbarer Energien anzupassen, um CO₂-Ausstoß und Energiekosten zu reduzieren. (Bild: © DigitalSpace – stock.adobe.com_KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/e5/33/e533f533e51ba60b0db4861c36101816/adobestock-939092274--c2-a9-20kamonwan-20-e2-80-93-20stock-adobe-com-ki-generiert-5798x3264v1.jpeg "Wissen per Knopfdruck: KI-basierte Assistenzsysteme wie der 8D-Assist machen Expertenwissen verfügbar. (Bild: Kamonwan – stock.adobe.com_KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/ef/a5/efa5c03f3c458a905668e4c8f9a12222/batterie-adobestock-1957383478-visionary-generiert-mit-ki-8190x4608v1.jpeg "Das Wachstum der deutschen Batterieindustrie wird primär von zwei industriellen Megatrends gestützt: dem anhaltenden Hochlauf der Elektromobilität sowie einer massiven Nachfrage nach stationären Speichersystemen. (Bild: AdobeStock_Visionary / generiert-mit-KI)")
:quality(80)/p7i.vogel.de/wcms/b6/39/b639721a14f3ed4af8bcd6b983cd26fe/recom-2465x1387v1.png "Die Racpro1-Familie endet nicht beim AC/DC-Netzteil. Sie wird durch Redundanzmodule und elektronische Schutzschalter ergänzt. (Bild: Recom)")
:quality(80)/p7i.vogel.de/wcms/e0/74/e074ee9c173a776a35d2616c57bbe4e6/bild-3-1248x702v1.png "Die Mink Rack-Brush wurde u.a. in einem Stengel Server-Rack verbaut. (Bild: Mink Bürsten)")
:quality(80)/p7i.vogel.de/wcms/ec/7c/ec7c56fc015d6fb8982ae82ec6c8cb9b/0131835086v2.jpeg "Die drei Säulen der Metrologie: wissenschaftlich, industriell, gesetzlich. (Bild: GTM GmbH)")
:quality(80)/p7i.vogel.de/wcms/e5/d5/e5d525f02f68ed8cde95b3405acffb0b/0131816272v2.jpeg "Jan Markvart testet das Ketop Safe Wireless in der Produktion. (Bild: Keba Industrial Automation GmbH)")
:quality(80)/p7i.vogel.de/wcms/d0/b5/d0b58f53bf0d4ed804d3b255b863c326/0131673194v2.jpeg "Die grundlegenden technischen DPP-Standards schaffen Transparenz für
Verbraucher, Industrie und Behörden. (Bild: © ImageFlow - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/09/81/0981a58a68530db70d8d67ec13d1c823/adobestock-96039220--c2-a9-203dsculptor-20--20stock-adobe-com-6000x3375v1.jpeg "Anwendungen, die im Weltall eingesetzt werden, stellen höchste Anforderungen an Antriebe. (Bild: © 3dsculptor - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/ea/9e/ea9e4f2c125ec5104c325e471be60efe/0131632764v2.jpeg "Stefan Huber (Head of Research, FH Salzburg) und Martin Haidacher (Innovation Manager, B&R) gemeinsam mit Technik von B&R
(Bild: B&R Industrie-Elektronik GmbH)")
:quality(80)/p7i.vogel.de/wcms/30/fe/30fed694c422d9fa70be1def67df9e96/0131594908v2.jpeg "Nord hat unter anderem die dezentralen Frequenzumrichter der Nordac-On-Familie mit neuen Funktionen im Bereich der Funktionalen Sicherheit ausgestattet. (Bild: Nord Drivesystems)")
:quality(80)/p7i.vogel.de/wcms/35/21/35215b04eac3455313ca51b72792c041/max-6-1080x608v1.png "IPF Electronic hat für das Unternehmen und alle Mitarbeiter eigene verbindliche Richtlinien für die Nutzung Künstlicher Intelligenz erarbeitet. (Bild: IPF Electronic)")
:quality(80)/p7i.vogel.de/wcms/bb/3a/bb3a3e3e2325113eb1ed97c5002a202f/-28c-29designbyfreepik2-5376x3022v1.jpeg "Humanoide Roboter könnten bereits in den kommenden zehn Jahren zu einem der wichtigsten Werkzeuge der modernen Industrie- und Dienstleistungsgesellschaft werden. (Bild: FreePik2)")
:quality(80)/p7i.vogel.de/wcms/9f/88/9f8886e390fea5f026a89ef164f7d6b6/david-reger-neura-product-family-4048x2277v1.jpeg "„Wir sind überzeugt, dass Physical AI und kognitive Robotik zu einem der größten Technologiesprünge der kommenden Jahrzehnte führen werden“, David Reger, Gründer und CEO von Neura Robotics (Bild: Neura Robotics)")
:quality(80)/p7i.vogel.de/wcms/56/e8/56e8e3795f0143046743769c710be5dd/newsimage422125-1776x1000v1.jpeg "Der Scout Rover des DLR im Einsatz im Kammstollen am Schneefernerhaus. (Bild: Erlend Hellerslien / DLR)")
:quality(80)/p7i.vogel.de/wcms/56/7b/567b3d4b554a1dbdcf835918350c021a/symbolbild-wahrnehmung-ki-1364x768v1.jpeg "KI-Modelle verarbeiten visuelle Informationen oft fragmentiert – neue Trainingsansätze setzen hier an. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/e3/c6/e3c68f83504c098804f49c6c0ab68afa/trucks-with-vipv-on-bridge-5472x3076v1.jpeg "Insbesondere Lieferwagen, Lkw und Anhänger verfügen über viel Dachfläche und verbrauchen gleichzeitig viel Energie für Kühlung, Heizung und Hilfsaggregate. Integrierte Solarmodule sind sinnvolle Lösung. (Bild: IM Efficiency)")
:quality(80)/p7i.vogel.de/wcms/a0/03/a003d1d5ee83399f232303f7c50bd93b/geralt-statistics-4623842-4752x2672v1.jpeg "Erholung mit Risiken: Deutschlands Wirtschaft zwischen geopolitischer Unsicherheit und technologischem Aufschwung. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/68/89/6889ce824f7362d1ee31c6114039849d/0131677915v2.jpeg "Nur menschliche Empathie schafft echte Beziehungen. Führungskräfte, die Hoffnung vermitteln und Vertrauen im Alltag leben, verwandeln Risiken automatisierter Entscheidungen in Chancen, die Organisation und Mitarbeitende gleichermaßen stärken. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/ed/02/ed02ce464ed1a39dcd7a617f55a4ffc1/0131677386v2.jpeg "Durch das Nutzen von KI gewinnen Führungskräfte Zeit für Entwicklungsgespräche, Perspektivenarbeit und persönliche Begleitung. Diese menschliche und persönliche Zuwendung signalisiert Mitarbeitern Wertschätzung und eröffnet Zukunftschancen. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/7d/df/7ddf9467a9acc812e8cc29324c3b080e/0131729703v2.jpeg "Zu viele verschiedene Varianten machen das Handling unübersichtlich. Denn ein geändertes Bauteil betrifft nicht nur eine Stückliste, sondern zieht Anpassungen in Prüfplänen, Dokumentation, Parametrierung und Ersatzteillogik nach sich. (Bild: © Radoman Durkovic - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/6c/66/6c6647dd81976d2c940f9514ec01f02a/schraub-20tec-074-3000x1687v1.jpeg "Der fachliche Austausch ist das, was die Regionalmesse Schraubtec ausmacht. (Bild: PHOTOVISION-DH )")
:quality(80)/p7i.vogel.de/wcms/58/63/586379bda19d8f06e6015cecb41a4967/kampagnenbild-1947x1095v1.png "(Bild: ANSYS Germany GmbH )")
:quality(80)/p7i.vogel.de/wcms/d1/12/d112dfa6e7df4c7af715a4833483f659/0126977441v1.jpeg "DIN RAIL SMART PROTECTION: RACPRO1 E-FUSE MODULE (Bild: RECOM Power GmbH)")
B & R-Antriebstechnik Resonanzfreies Positionieren von schwingungsfähigen Systemen am Beispiel von offenen Behältern mit Flüssigkeiten
Eine volle Kaffeetasse von einem Ort zum anderen zu tragen, ist keine leichte Aufgabe. Geschicktes Jonglieren ist gefragt, damit nichts überschwappt. Auch Lebensmittel im Produktionsprozess dürfen nicht verschwappen. Ein moderner Joghurt zum Beispiel benötigt viele Produktionsschritte bis er im Kühlregal landet.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/113800/113818/65.jpg "Turck_Your_Global_Automation_Partner.jpg ()")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/76800/76895/65.jpg "FAULHABER_120mm.jpg ()")
Für eine zeitliche Prozessoptimierung von Abfüllanlagen wird ein Beschleunigungsprofil gesucht, das eine sichere Bewegung der offenen Behälter mit einer Lebensmittelflüssigkeit gewährleistet. Mit modernen Antrieben lassen sich solche Aufgaben realisieren. Die Lösung beinhaltet neben der traditionellen Vorgehensweise auch moderne, zeiteinsparende Arbeitsschritte.
Speziell bei diskontinuierlich arbeitenden Abfüllanlagen für flüssige Lebensmittel führt das Starten und Stoppen von offenen Behältern zu einer verlängerten Prozesslaufzeit. Durch das Beschleunigungsprofil des Transportbandes werden Systemfrequenzen der Flüssigkeit angeregt, sodass nur schwer kontrollierbare Bewegungen entstehen. Wenn der Behälter nach dem Starten wieder zum Stillstand gekommen ist, kann eine Bewegung der Flüssigkeit wahrgenommen werden, was bei mehreren Positioniervorgängen hintereinander zu Resonanzverhalten bzw. zu einem „Aufschwappen“ führen kann. Das resonanzfreie Positionieren, das an der Hochschule Heilbronn im Studiengang Robotik und Automation erforscht wird, kann Abhilfe schaffen. Gesucht und gefunden wurde eine passende Ansteuerungsmethode, die Eigenfrequenzen derartiger Systeme nicht anregt, dadurch werden die Eigenschwingungen unterdrückt.
Die Flüssigkeiten dürfen den oberen Behälterrand zum einen aus hygienischen und zum anderen aus verfahrenstechnischen Gründen nicht überschreiten. Sobald die Flüssigkeit den Behälterrand „berührt“, ist eine spätere Versiegelung des Behälters nicht mehr möglich bzw. könnte in diesem Fall keine vollständige Dichtigkeit mehr garantiert werden.
Von der Simulation direkt auf die Maschine
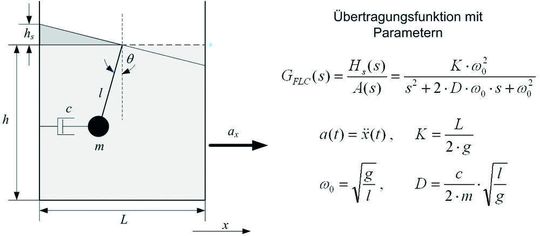
Das dynamische Bewegungsverhalten der Flüssigkeitsoberfläche kann näherungsweise durch ein gedämpftes Feder-Masse-Modell veranschaulicht wiedergegeben werden. Daraus lässt sich nun eine sogenannte Übertragungsfunktion des schwingungsfähigen Systems ableiten. Diese Funktion beschreibt mathematisch das Verhalten der Flüssigkeitsauslenkung in Abhängigkeit der Behälterbeschleunigung und stellt somit die Basis für die weiteren Entwicklungsschritte dar.
Mit Matlab/Simulink-Modell simulieren
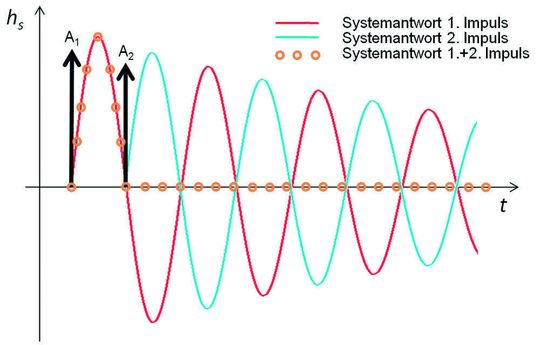
Das Softwarepaket Matlab/Simulink von The MathWorks ist eine leistungsfähige PC-Software für das numerische Lösen und graphische Darstellen von mathematisch technischen Problemstellungen. Mit Hilfe eines Matlab/Simulink-Modells für das Flüssigkeitsverhalten kann nun entsprechendes auf dem PC simuliert und analysiert werden, was zweifelsohne eine enorme Zeitersparnis von unzähligen Versuchsreihen mit sich bringt. Betrachtet man nun mit diesem „Werkzeug“ die Auswirkungen von Beschleunigungsimpulsen auf das System, so lässt sich folgender Ansatz für das resonanzfreie Positionieren gewinnen: Eine bestimmte Überlagerung von Impulsantworten des Systems führt zu einer „Auslöschung“ der restlichen Amplituden, sodass keine Restschwingungen mehr vorhanden sind.
Erhöhte Robustheit
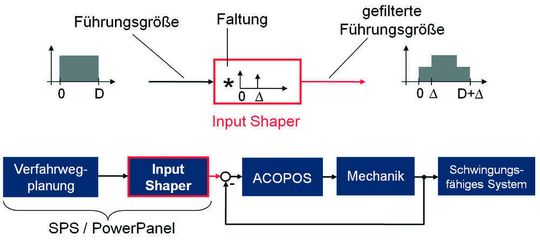
Der sogenannte ZV Input Shaper (Zero Vibration) besitzt die Mindestanzahl von zwei Impulsen. Die Amplituden- und Zeitwerte hängen letztendlich nur von der Periodendauer des gedämpften Systems TD und von der Dämpfung D ab. Mit Kenntnis dieser Systemparameter können die Impulse problemlos ausgerechnet werden. Faltet man nun eine nahezu beliebige Eingangsgröße mit diesen beiden Impulsen, so werden keine Schwingungen mehr vorhanden sein. Das nachfolgende Bild zeigt die prinzipielle Funktionsweise der Faltung (hier: Δ = TD /2) und dessen Integration in das Steuerungsgesamtsystem.

Der Input Shaper kann als eine Art Softwarevorfilter für den Acopos in Bezug auf die Führungsgröße (Beschleunigung) betrachtet werden. Abgeleitet aus dieser Grundidee lassen sich nun weitere Vorfilter realisieren. So besitzt zum Beispiel der sogenannte ZVD-Shaper drei Impulse und dadurch eine erhöhte Robustheit in Bezug auf Veränderung der Systemparameter zur Prozesslaufzeit. Der Preis, der dafür in Kauf genommen werden muss, ist eine entsprechend längere Laufzeit des Filters um Δt = TD. Das nachfolgende Bild vergleicht die Systemantworten bei entsprechend filtrierten Beschleunigungsprofilen und einem modellierten Fehler in der Eigenfrequenz von zehn Prozent.
Die Flüssigkeitsoberfläche schwingt nicht mehr
Im vorliegenden Beispiel treten beim Positionieren keine Schwingungen der Flüssigkeitsoberfläche mehr auf und die maximale Auslenkung der Flüssigkeit ist nur noch von der maximalen Beschleunigung des Behälters abhängig. Das hat zum einen den Vorteil, dass die Prozesszeit reduziert werden kann und zum anderen unerwartet hohe Auslenkungsamplituden (z.B. bei Resonanz) vermieden werden. Letzteres kann für eine geringere Kopfhöhe des Bechers (Abstand von Flüssigkeitsoberfläche zum Becherrand) ausgenutzt werden, was wiederum ein entsprechendes Einsparpotential in der Verpackung (Bechergröße) mit sich bringt.
Softwarebasierte Lösung spart Kosten
Die offene Parametrierbarkeit des Acopos-Konzeptes und der strukturelle Aufbau der Entwicklungsumgebung Automation Studio ermöglichen nicht nur die Implementierung eines derartigen Vorfilters, sondern steigern zudem um ein Vielfaches die Entwicklungseffektivität und Softwarestabilität durch die B&R Automation Studio Toolbox für Matlab/Simulink. Traditionell würde nach der Modellierung, Parameterermittlung und Simulation das Nach- bzw. Ausprogrammieren des Modells für die Maschinen-Realität erfolgen. Diese zuletzt genannte Arbeitsphase ist nicht nur zeitraubend, sondern zudem auch noch fehlerbehaftet. Nebenbei bemerkt bereitet sie evtl. auch nicht jedem viel Spaß, da ja das eigentliche Know-how bereits im Modell liegt.
Ein einfacher Programm-Download
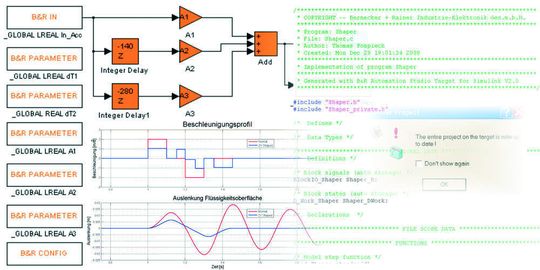
Mit steigender Komplexität des Modells wird sich die zeitliche Ineffektivität dieser Arbeitsphase zunehmend negativ auf die Gesamtentwicklung auswirken. Genau hier setzt die Automation Studio Toolbox für Simulink an und lässt wieder Freude aufkommen. Dieser Codegenerator liefert nicht nur „per Knopfdruck“ den auf B&R-Hardware optimierten Quellcode des Modells, sondern integriert diesen auch noch automatisch in das Automation Studio-Gesamtprojekt. Beeindruckend dabei die Transparenz und Lesbarkeit des Quellcodes sowie die Realisierung der Schnittstelle zum restlichen Automation Studio Projekt, was oftmals die Achillesferse von derartigen Codegeneratoren darstellt. Mit einem einfachen Programmdownload aus dem Automation Studio heißt es dann: “Das aktuelle Projekt auf dem Zielsystem ist nun auf dem neuesten Stand“.
Kontakt: pospiech@hs-heilbronn.de oder peter.hubinsky@stuba.sk
Dipl.-Ing. (FH) Thomas Pospiech (links) ist wissenschaftlicher Mitarbeiter im Studiengang Robotik und Automation, im Labor für Automatisierungs- und Steuerungstechnik sowie Lehrbeauftragter im Studiengang Mechatronik und Mikrosystemtechnik an der Hochschule Heilbronn. Ausserdem ist er PhD-Student an der Slowakisch Technischen Universität Bratislava am Lehrstuhl für Automatisierungs- und Steuerungstechnik.

Assoc. Prof. Dipl.Ing, PhD. Peter Hubinský ist Professor an der Slowakisch Technischen Universität in Bratislava, am Lehrstuhl für Automatisierungs- und Steuerungstechnik, Systemtheorie und Antriebstechnik, Steuerung von Robotersystemen.
(ID:309277)
:quality(80)/p7i.vogel.de/wcms/be/1e/be1ec0d43da1cde257243f7dffcf5290/0128553956v2.jpeg "3D-Modellierungssoftware Blender mit dem integrierten Bauteilekatalog von MHJ-Software (links), dem Aufbau einer virtuellen Anlage im Konstruktionsbereich (zentral) sowie dem speziell entwickelten Plugin zur Skill-Konfiguration (rechts). (Bild: MHJ-Software)")
:quality(80)/p7i.vogel.de/wcms/00/fd/00fdab4f9063097e1da6c9bf34e475d0/0126448215v2.jpeg "Der Industrial Powerise IPR35 Smart von Stabilus mit integrierter Steuerungsplatine eignet sich für alle Anwendungen, bei denen keine externe Steuerung angebracht werden kann oder soll. (Bild: Stabilus GmbH)")