:quality(80)/p7i.vogel.de/wcms/2b/d4/2bd40168bce48c337b86a451b11fd865/hqdipr202606197409-02-1000x563v1.jpeg "Sinumerik One bildet die technologische Basis für das Retrofit von Walzenschleifmaschinen und ermöglicht eine moderne, leistungsfähige CNC-Steuerung. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/61/71/617123e3846b0079e580895c5bc37d40/2-995x560v1.png "Das Forschungsteam an der TU München misst und regelt die Sehnenkräfte an dem Roboter. Das Ziel des Forschungsprojekts sind neuartige Regelungskonzepte. (Bild: TU München)")
:quality(80)/p7i.vogel.de/wcms/d5/09/d5091cd9a582aa0f780740ec4faac973/0130381601v2.jpeg "Die Besucher freuten sich vor allem über das vielfältige Programm. (Bild: Stefan Bausewein/VCG)")
:quality(80)/p7i.vogel.de/wcms/b6/f5/b6f57042111d87f229188016760aa9be/0130112613v2.jpeg "„Den Teilnehmern werden auch Strategien vorgestellt, wie sie nicht nur gesetzliche Vorgaben erfüllen, sondern auch Innovationsführer in ihrem Sektor werden können“, so Michelle Duerksen, Sustainability Sales Manager bei Schneider Electric. (Bild: Schneider Electric)")
:quality(80)/p7i.vogel.de/wcms/03/e3/03e358c7d85b64d95c4c2c972c7491f8/94048294.jpeg "Bei neuen Produktideen spielen die Kosten eine maßgebliche Rolle. Mit Design-to-Cost-Methoden lässt sich genau planen, wie Kosten am besten eingespart werden. (Bild: gemeinfrei)")
:quality(80)/p7i.vogel.de/wcms/8d/67/8d67542f3e3f9b82f36addcdb6fc9292/vdi-wissensforum-2000x1125v1.jpeg "Rund 320 Teilnehmende aus Industrie und Wissenschaft diskutierten aktuelle Entwicklungen in der Automatisierung. (Bild: VDI Wissensforum)")
:quality(80)/p7i.vogel.de/wcms/80/26/80264ee068ef7dcc1f342e5f4693743b/geralt-artificial-intelligence-3706562-4736x2667v1.jpeg "Unternehmen bauen zunehmend digitale Ökosysteme auf, um
übergeordnete Herausforderungen zu bewältigen – sei es schnellere Innovation, der Umgang
mit Lieferkettenvolatilität oder die Dekarbonisierung komplexer globaler Betriebe.
(Bild: )")
:quality(80)/p7i.vogel.de/wcms/5f/94/5f948e97ebbd674879b4ecde79fb8c12/0132092944v2.jpeg "Der Grundlagentag Wärmemanagement ist ein wesentlicher Bestandteil der Fachkonferenz „Power of Electronics” und hat sich ursprünglich aus den „Cooling Days” entwickelt. (Bild: Stefan Bausewein)")
:quality(80)/p7i.vogel.de/wcms/e2/73/e273e6370fb756735ac06d7ef14bf67c/adobestock-1877003493-puhimec-3521x1983v1.jpeg "Die Elektrifizierung der Industrie wird zur betriebswirtschaftlichen Notwendigkeit. Sie ermöglicht, Energie aus einem System zu beziehen, das sich besser steuern, prognostizieren und optimieren lässt als fossile Alternativen. (Bild: © puhimec – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/ef/a5/efa5c03f3c458a905668e4c8f9a12222/batterie-adobestock-1957383478-visionary-generiert-mit-ki-8190x4608v1.jpeg "Das Wachstum der deutschen Batterieindustrie wird primär von zwei industriellen Megatrends gestützt: dem anhaltenden Hochlauf der Elektromobilität sowie einer massiven Nachfrage nach stationären Speichersystemen. (Bild: AdobeStock_Visionary / generiert-mit-KI)")
:quality(80)/p7i.vogel.de/wcms/52/9e/529ed65065534bea9f29da7fe1346482/0131840272v2.jpeg "Jürgen Greger, Experte für industrielle Kommunikation bei Lapp. (Bild: Lapp)")
:quality(80)/p7i.vogel.de/wcms/e7/3e/e73e7453e41c35c939d0b3ca17c4eb81/factory-20x-panelteilnehmer-20zum-20thema-20industrie-20im-20wandel-20-e2-80-93-20ohne-20daten--c3-96kosysteme-20keine-20-28ki--29-20zukunft-small-3000x1687v1.jpeg "Panelteilnehmer zum Thema: „Industrie im Wandel – ohne Daten-Ökosysteme keine (KI-) Zukunft?“
Von links nach rechts: Rainer Brehm (SIEMENS), Dr. Stephan Mayer (Trumpf); Prof.Dr. Dipl-Ing Berend Denkena (DMG Mori) Dr. Beate Baron (BMWE), Hagen Heubach (SAP)
(Bild: Factory-x)")
:quality(80)/p7i.vogel.de/wcms/ec/7c/ec7c56fc015d6fb8982ae82ec6c8cb9b/0131835086v2.jpeg "Die drei Säulen der Metrologie: wissenschaftlich, industriell, gesetzlich. (Bild: GTM GmbH)")
:quality(80)/p7i.vogel.de/wcms/28/5a/285af4d2fc9c346303d06078a497c9ce/energieeffizienz-20in-20der-20antriebstechnik-1-6456x3634v1.png "Durch den Einsatz moderner Frequenzumrichter lassen sich Lastspitzen reduzieren und Energieanteile aus Bremsvorgängen zurückführen. (Bild: Mitsubishi Electric)")
:quality(80)/p7i.vogel.de/wcms/09/81/0981a58a68530db70d8d67ec13d1c823/adobestock-96039220--c2-a9-203dsculptor-20--20stock-adobe-com-6000x3375v1.jpeg "Anwendungen, die im Weltall eingesetzt werden, stellen höchste Anforderungen an Antriebe. (Bild: © 3dsculptor - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/ea/9e/ea9e4f2c125ec5104c325e471be60efe/0131632764v2.jpeg "Stefan Huber (Head of Research, FH Salzburg) und Martin Haidacher (Innovation Manager, B&R) gemeinsam mit Technik von B&R
(Bild: B&R Industrie-Elektronik GmbH)")
:quality(80)/p7i.vogel.de/wcms/e7/ce/e7ceeda3cc28f156a68f0511386bbdd9/20260402-fb3-billardtisch-pollmeier-0260-slider-2258x1270v1.jpeg "Studierende des praxisinterierten Bachelorstudiengangs Mechatronik/Automatisierung am Campus Gütersloh der HSBI entwickelten im Rahmen eines zweisemestrigen Projekts einen vollautomatisierten Billardtisch, der selbstständig gegen menschliche Spieler antreten kann. (Bild: P. Pollmeier/HSBI)")
:quality(80)/p7i.vogel.de/wcms/1e/fc/1efcbcfd82d344c6e52a9671dc6ad199/verity-20flugdrohne-2000x1125v1.jpeg "Die Flugroboter von Verity unterstützen im Logistik- und Einzelhandelssektor, indem sie Lagerbestände kontinuierlich überwachen – ohne GPS und menschliches Eingreifen. (Bild: Verity)")
:quality(80)/p7i.vogel.de/wcms/7a/13/7a132416dbdc9734c7c0ef2041cdd964/260615-aut-27-grafik-presseaussand-d-107371-2000x1124v1.jpeg "82% der befragten bewerten humanoide Roboter als Innovationstreiber der Zukunft.
(Bild: Messe München)")
:quality(80)/p7i.vogel.de/wcms/ef/e4/efe4e9f4fdd8bcb08127915e2dae0d73/0132016773v1.jpeg "Mit der Validierung des Laserverstärkers an einem Ionenfallen-Quantencomputer von „NeQxt“ wird in Zusammenarbeit mit dem Fraunhofer IZM aus Berlin ein Baustein zur technologischen Souveränität Europas in Sachen Quantencomputing aus der Taufe gehoben. (Bild: „NeQxt“)")
:quality(80)/p7i.vogel.de/wcms/56/7b/567b3d4b554a1dbdcf835918350c021a/symbolbild-wahrnehmung-ki-1364x768v1.jpeg "KI-Modelle verarbeiten visuelle Informationen oft fragmentiert – neue Trainingsansätze setzen hier an. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/e3/c6/e3c68f83504c098804f49c6c0ab68afa/trucks-with-vipv-on-bridge-5472x3076v1.jpeg "Insbesondere Lieferwagen, Lkw und Anhänger verfügen über viel Dachfläche und verbrauchen gleichzeitig viel Energie für Kühlung, Heizung und Hilfsaggregate. Integrierte Solarmodule sind sinnvolle Lösung. (Bild: IM Efficiency)")
:quality(80)/p7i.vogel.de/wcms/93/1a/931a35db6d90693283049b840dcacd2b/st-hannover-149-6048x3400v1.jpeg "Der fachliche Austausch zwischen Besucher und Aussteller ist das, was die Schraubtec ausmacht. (Bild: PHOTOVISION-DH GmbH)")
:quality(80)/p7i.vogel.de/wcms/68/89/6889ce824f7362d1ee31c6114039849d/0131677915v2.jpeg "Nur menschliche Empathie schafft echte Beziehungen. Führungskräfte, die Hoffnung vermitteln und Vertrauen im Alltag leben, verwandeln Risiken automatisierter Entscheidungen in Chancen, die Organisation und Mitarbeitende gleichermaßen stärken. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/ed/02/ed02ce464ed1a39dcd7a617f55a4ffc1/0131677386v2.jpeg "Durch das Nutzen von KI gewinnen Führungskräfte Zeit für Entwicklungsgespräche, Perspektivenarbeit und persönliche Begleitung. Diese menschliche und persönliche Zuwendung signalisiert Mitarbeitern Wertschätzung und eröffnet Zukunftschancen. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/7d/df/7ddf9467a9acc812e8cc29324c3b080e/0131729703v2.jpeg "Zu viele verschiedene Varianten machen das Handling unübersichtlich. Denn ein geändertes Bauteil betrifft nicht nur eine Stückliste, sondern zieht Anpassungen in Prüfplänen, Dokumentation, Parametrierung und Ersatzteillogik nach sich. (Bild: © Radoman Durkovic - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/58/63/586379bda19d8f06e6015cecb41a4967/kampagnenbild-1947x1095v1.png "(Bild: ANSYS Germany GmbH )")
:quality(80)/p7i.vogel.de/wcms/d1/12/d112dfa6e7df4c7af715a4833483f659/0126977441v1.jpeg "DIN RAIL SMART PROTECTION: RACPRO1 E-FUSE MODULE (Bild: RECOM Power GmbH)")
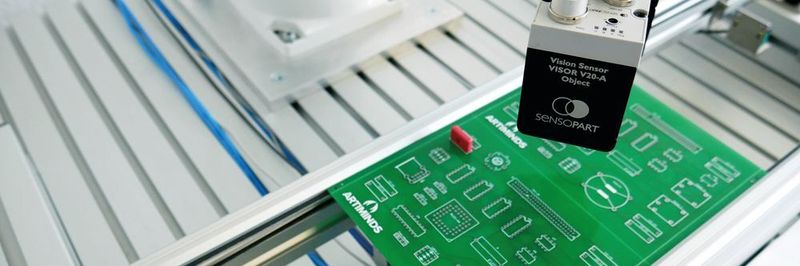
Bildverarbeitung Vision- und Kraft-Moment-Sensor verleihen Robotern Feingefühl
Menschen mit Feinmotorik können problemlos ein Elektronik-Bauteil auf eine Platine stecken, ohne dass die empfindlichen Pins verbogen oder abgeknickt werden. Mithilfe eines Vision- und Kraft-Momenten-Sensors sowie einer Software zur Bewegungssteuerung ist es auch möglich, einem Roboter das nötige Feingefühl beizubringen.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/122400/122424/65.jpg "SIKO Logo_300x300px.jpg ()")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/76800/76895/65.jpg "FAULHABER_120mm.jpg ()")
Industrieroboter haben heute einen hohen Entwicklungsstand erreicht – zunehmend werden sie auch für anspruchsvolle Montageaufgaben eingesetzt, die bisher dem Menschen vorbehalten waren. Der höhere Automatisierungsgrad erlaubt zum einen wichtige Kosteneinsparungen in Hochlohnländern, zum anderen ermöglicht er eine höhere Präzision und Reproduzierbarkeit in der Produktion. Ein Problem dabei: Im Unterschied zum Menschen ist der Roboter erst einmal „blind und gefühllos“ und kann nur an bekannte, das heißt vorprogrammierte Stellen, greifen. Ist ein aufzugreifendes Bauteil einmal nicht exakt gleich hinsichtlich Form oder Position, scheitert der Roboter oder richtet Schaden an. Um auch Werkstücke mit Fertigungstoleranzen oder in wechselnden Lagen aufgreifen zu können, benötigt der Roboter „Augen“. Das Sehvermögen wird in der Regel mit einem bildverarbeitenden Vision-Sensor verliehen. Damit empfindliche Teile beim Greifen und Bestücken nicht beschädigt werden, kann der Robotergreifer zusätzlich mit einem Kraft-Momenten-Sensor ausgestattet werden, der Druckkräfte und Drehmomente an die Steuerung übermittelt.
Programmierung auf unterschiedliche Roboter portieren
Ist damit das Problem schon gelöst? Nein, denn die gewünschten Bewegungsabläufe müssen dem Roboter natürlich erst beigebracht, d.h. in der Robotersteuerung programmiert werden. Dies bedeutet einen hohen Anfangsaufwand, der zudem beim Austausch eines Roboters wiederholt werden muss. Denn Robotersysteme verschiedener Hersteller unterscheiden sich hinsichtlich Absolutgenauigkeit, Verfahrgeschwindigkeit, Traglastbereich oder Arbeitsraum, sodass einmal erstellte Programme nicht übertragbar sind. Um Anwender aus diesem Dilemma zu befreien, hat das IT-Unternehmen Artiminds Robotics, eine Ausgründung aus dem Karlsruhe Institut für Technologie (KIT), mit Artiminds RPS eine Programmierplattform entwickelt, die mit unterschiedlichen Robotersystemen arbeitet und die eine einfache Übertragung einmal programmierter Bewegungsabläufe auf ein anderes System ermöglicht. Das Einlernen des Roboters funktioniert dabei nach dem Teach-in-Prinzip. Mittels grafischer Programmierung per Drag & Drop wird zuerst die gewünschte Aufgabenreihenfolge zusammengestellt. Für jeden Baustein wird dann das Teach-in durchgeführt, um Schlüsselpunkte der Bewegung aufzuzeichnen und so das gewünschte Bewegungsprogramm zu generieren. Daraus erzeugt das System selbsttätig den Quellcode für das spezifische Robotersystem, einschließlich kraftsensitiver Bewegungen. Unterstützt werden Robotersysteme der Hersteller Kuka, Denso und Universal Robots sowie eine Vielzahl von Sensorsystemen, sodass sich einmal erstellte Programme einfach portieren lassen.
Vision-Sensor bestimmt einfach Positionen
Entscheidend für die Durchführung sensibler Aufgaben sind die visuellen Daten der Umgebung. Diese werden dem Roboter von einem Vision-Sensor der Reihe Visor des Herstellers Sensopart Industriesensorik geliefert. Der kompakte Sensor mit integrierter Beleuchtung bietet Funktionen, die für eine zuverlässige Erfassung und Positionierung von Objekten benötigt werden. Dazu gehören auch eine leistungsfähige Lagenachführung sowie spezielle Roboterfunktionen wie Greifer-Freiraumprüfung und Greifpunkt-Offset, die das Aufnehmen nah aneinander liegender Teile bzw. das außermittige Greifen von Teilen erleichtern. Dabei zeichnet sich die Visor-Konfigurationssoftware durch eine ein- fache, intuitive Programmierung aus. Zur Einrichtung des Vision-Sensors benötigt der Anwender keine spezifischen Bildverarbeitungskenntnisse – mit ein paar Mausklicks lässt sich die Konfiguration einfach an wechselnde Teilearten und -formen anpassen. Die Positionsdaten eines identifizierten Objekts liefert der Vision-Sensor bereits kalibriert in Roboterkoordinaten. Sowohl das von Artiminds RPS erzeugte Roboterprogramm als auch das Programm des Vision-Sensors arbeiten im produktiven Einsatz autark, das heißt, sie benötigen keine Verbindung zum PC, auf dem die Konfiguration vorgenommen wurde.
Das Problem in der vorliegenden Aufgabe besteht in den großen Fertigungstoleranzen des Bauteilgehäuses relativ zur Position der Kontakte, das heißt, diese sitzen nicht zwingend in der Mitte. Zudem sind die Kontakte geschnitten und nicht abgerundet, sodass selbst kleine Positionsabweichungen dazu führen, dass die Kontakte beim Stecken an den Lochrändern hängen bleiben. Mit dem Visor ist es dem Roboter nun möglich, die Komponente positionsgenau zu erkennen, zu greifen und zu stecken. Arti-Minds RPS erlaubt bei Bedarf eine iterative Lagekorrektur durch mehrmalige Bildaufnahme und Verrechnung der Ergebnisse. Ein Kraft-Momenten-Sensor begrenzt die beim Stecken aufgewendete Kraft, sodass eine Beschädigung des Bauteils vermieden wird. Gesteuert von Arti-Minds RPS drückt der Roboter das Bauteil mit einer definierten, kleinen Kraft auf den Kontaktring der Platine. Werden die Löcher nicht direkt getroffen, führt der Greifer unter Aufrechterhaltung der Kraft eine spiralförmige Suchbewegung aus, bis die Kontakte vom Kontaktring ins Loch rutschen.
Menschliches Feingefühl ist automatisierbar
Die Programmierplattform Artiminds RPS in Kooperation mit dem Vision-Sensor Visor von Sensopart erweitert den Anwendungsbereich von Industrierobotern im Hinblick auf die Übernahme schwieriger Montage- und Bestückungsaufgaben, die bisher mangels menschlicher Qualitäten wie Umsicht und Feingefühl nicht zuverlässig automatisierbar waren. Aufgrund der intuitiven Bedienung der Programmierplattform und des Vision-Sensors ist die Einrichtung auch für Anwender ohne spezifische Programmier- oder Bildverarbeitungskenntnisse ohne Weiteres möglich, erklären die Unternehmen.
* *Dr. Klaus Berdel, Sensopart Industriesensorik, und Dr. Rainer Jäkel, Artiminds Robotics
(ID:44851707)
:quality(80)/p7i.vogel.de/wcms/b4/96/b496c8dc8cb100378ab5eb98b7f18b6d/0125652611v1.jpeg "Als ersten Schritt haben die Forschenden einarmige Roboter gängiger Hersteller, die in der Industrie und Forschung eingesetzt werden, untersucht und kategorisiert. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/af/58/af58251098e771774636b212f7468d10/0127706747v2.jpeg "Die Lagerkräfte werden über die Kreuzrollenlager abgeleitet. Der Sensor erfasst daher nur das Drehmoment. (Bild: Harmonic Drive)")