:quality(80)/p7i.vogel.de/wcms/2b/d4/2bd40168bce48c337b86a451b11fd865/hqdipr202606197409-02-1000x563v1.jpeg "Sinumerik One bildet die technologische Basis für das Retrofit von Walzenschleifmaschinen und ermöglicht eine moderne, leistungsfähige CNC-Steuerung. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/61/71/617123e3846b0079e580895c5bc37d40/2-995x560v1.png "Das Forschungsteam an der TU München misst und regelt die Sehnenkräfte an dem Roboter. Das Ziel des Forschungsprojekts sind neuartige Regelungskonzepte. (Bild: TU München)")
:quality(80)/p7i.vogel.de/wcms/d5/09/d5091cd9a582aa0f780740ec4faac973/0130381601v2.jpeg "Die Besucher freuten sich vor allem über das vielfältige Programm. (Bild: Stefan Bausewein/VCG)")
:quality(80)/p7i.vogel.de/wcms/b6/f5/b6f57042111d87f229188016760aa9be/0130112613v2.jpeg "„Den Teilnehmern werden auch Strategien vorgestellt, wie sie nicht nur gesetzliche Vorgaben erfüllen, sondern auch Innovationsführer in ihrem Sektor werden können“, so Michelle Duerksen, Sustainability Sales Manager bei Schneider Electric. (Bild: Schneider Electric)")
:quality(80)/p7i.vogel.de/wcms/f7/87/f787c54cc9e3fa178b3286106bbc553f/adobestock-2094179731--thipsuda-stock-adobe-com-ki-generiert-1905x1072v1.jpeg "Quantenrepeater verteilen Quanteninformationen und Verschränkung über weite Strecken und bilden so die technologische Basis für das Quanteninternet der Zukunft. (Bild: © Thipsuda – stock.adobe.com / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/9a/27/9a2784ee5bb7f595a8c08726ec3f9ecc/ziaurrehman-f-cybersecurity-10398389-5460x3072v1.jpeg "Ein Klick, ein Stillstand: Wie Ransomware die Fabrik von Fairlife lahmlegte. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/42/96/42969a1445c4620ef0cbae7ec8191391/0132052516v2.jpeg "Wenn es um das Wärmemanagement geht, sollten Hardware-Entwickler und Konstrukteure zusammenarbeiten. (Bild: ROSSandHELEN photoqraphers)")
:quality(80)/p7i.vogel.de/wcms/cc/e3/cce35deb9b98be9cb9f78e66e7b0a661/newsimage425331-2960x1666v1.jpeg "Mit dem Lightweaver-Mikroskop lässt sich ein zehnmal größeres Bildfeld erzielen als bisher möglich war. (Bild: Universität Bielefeld/Jana Haver)")
:quality(80)/p7i.vogel.de/wcms/0a/c6/0ac6b2ca4dc4f2d7c6f6e95037de2d5d/newsimage425297-2250x1265v1.png "Das Kühlsystem eines Quantencomputers hält die Quantenchips bei Temperaturen nahe dem absoluten Nullpunkt. Erst unter diesen Bedingungen können sie ihre besonderen Quanteneigenschaften entfalten (künstlerische Darstellung). (Bild: B. Schröder/HZDR)")
:quality(80)/p7i.vogel.de/wcms/db/3e/db3e3f1ae0736c5566fbc42e4391769b/snap-1997x1123v1.jpeg "Mit Tesys Deca Snap In bietet Schneider Electric eine Lösung für das Motormanagement mit patentiertem Snap-In-Design. (Bild: Schneider Electric)")
:quality(80)/p7i.vogel.de/wcms/8b/9d/8b9df47239100d03e6e7f69cf2d6cb03/eq9a0354-kl-1500x844v1.jpeg "Andreas Hoffmann verantwortet bei EBE das Produktmanagement sowie den Vertrieb von HMI-Komponenten. (Bild: EBE)")
:quality(80)/p7i.vogel.de/wcms/ef/2c/ef2c4c5700d487b6f3676797fe23d4b7/eq9a0354-kl-1500x844v1.jpeg "Andreas Hoffmann ist bei EBE Sensors + Motion als Produktmanager HMI tätig. (Bild: EBE)")
:quality(80)/p7i.vogel.de/wcms/dd/fc/ddfcc0b79e351e582e478fb6c0f0c788/hms-marktanteilenetzwerke-2026-3000x1687v1.jpeg "Die Analyse 2026 zeigt, dass Industrial Ethernet inzwischen 79 Prozent aller neuen Knoten ausmacht und damit gegenüber 76 Prozent im Jahr 2025 weiter zugelegt hat. Die drei führenden Ethernet-Protokolle konnten ihre Position erneut ausbauen und repräsentieren zusammen inzwischen rund drei Viertel des kabelgebundenen Protokollmarktes. (Bild: HMS Networks)")
:quality(80)/p7i.vogel.de/wcms/19/dd/19dd5f52d6bad28d399626eadcc8396c/0132353833-1000x563v1.jpeg "Im durchsichtigen, 3D-gedruckten Bauteil, dreht sich der schwebende „Schwimmer“ (rot-blau markiert) an der Wasseroberfläche. (Bild: Cheng Zeng / Sinano)")
:quality(80)/p7i.vogel.de/wcms/32/3d/323d0774d5c3e5d671c16323c2012c1d/kollmorgen-image-201-3872x2179v1.jpeg "In Gefahrenzonen sind explosive Gase oder brennbare Stäube nicht dauerhaft vorhanden; unter anormalen Betriebsbedingungen oder für begrenzte Zeiträume können sie jedoch auftreten. (Bild: Kollmorgen)")
:quality(80)/p7i.vogel.de/wcms/25/67/2567a762b26115eddacae3a2f3b7d560/inovance-20x-20vascat-203-1600x900v1.jpeg "David Bedford Guaus (re.), Country Manager bei Inovance Technology Spain und Technischer Direktor für Inovance in den Regionen Europa und Nordamerika, sagt: „Die gemeinsame Suche nach einer Lösung zur Integration unserer Antriebe in das System hat unsere Zusammenarbeit mit Vascat weiter verbessert und wir hoffen sehr, in Zukunft wieder zusammenzuarbeiten.“ (Bild: Inovance)")
:quality(80)/p7i.vogel.de/wcms/b9/00/b900518354ac558a14bc60599284bff0/gemini-generated-image-physical-20ai-2728x1536v1.png "Wahrnehmen, entscheiden, handeln: Bei Physical AI verschmelzen Aktorik, 3D-Sensorik und Edge-Computing zu einem geschlossenen System. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/09/69/09695c87c8d85c087117e1f8e784562a/pm3626-1-2551x1435v1.jpeg "Damit Bootsrümpfe sauber bleiben: Der Unterwasserroboter KeelCrab nutzt schmierfreie Polymerlager von igus für einen wartungsarmen und korrosionsfreien Einsatz im Salzwasser. (Bild: Igus SE & Co. KG / KI-unterstützt)")
:quality(80)/p7i.vogel.de/wcms/87/0c/870ca78978ff2a03f4fd558dc978dbeb/newsimage425258-3000x1687v1.jpeg "Studenten vom Campus Gütersloh haben einen Pancake-Roboter gebaut, der selbstgezeichnete Formen zu individuellen, farbigen Pancakes drucken kann. (Bild: P. Pollmeier/HSBI)")
:quality(80)/p7i.vogel.de/wcms/70/6f/706f580af54fe933872e86f3d3f0386e/hm26-13-000042-1600x900v1.png "Der Robotics Award 2026 wurde an das Startup Good Bytz vergeben. Die prämierte Lösung ist ein Küchensystem, in dem leichte, kompakte Industrieroboter zum Einsatz kommen. (Bild: Deutsch Messe AG)")
:quality(80)/p7i.vogel.de/wcms/d6/14/d614c42f7644d82f3347686e8c249df8/adobestock-452368624--c2-a9-20digital-20gfx-20-e2-80-93-20stock-adobe-com-7000x3940v1.jpeg "Noch Zukunftsmusik, aber mit konkretem Potenzial: Quantencomputing könnte Energienetze und Lieferketten nachhaltiger machen. (Bild: © Digital GFX – stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/b6/1e/b61ee9620cff0c1e614d908d5036220b/wertsch-c3-b6pfung-kigeneriert-gemini-1018x573v1.jpeg "Digitale Technologien ermöglichen die Erfassung und Auswertung von Daten entlang des gesamten Produktlebenszyklus und gelten als Schlüssel für zirkuläre Wertschöpfung. (Bild: )")
:quality(80)/p7i.vogel.de/wcms/e7/3e/e73e7453e41c35c939d0b3ca17c4eb81/factory-20x-panelteilnehmer-20zum-20thema-20industrie-20im-20wandel-20-e2-80-93-20ohne-20daten--c3-96kosysteme-20keine-20-28ki--29-20zukunft-small-3000x1687v1.jpeg "Panelteilnehmer zum Thema: „Industrie im Wandel – ohne Daten-Ökosysteme keine (KI-) Zukunft?“
Von links nach rechts: Rainer Brehm (SIEMENS), Dr. Stephan Mayer (Trumpf); Prof.Dr. Dipl-Ing Berend Denkena (DMG Mori) Dr. Beate Baron (BMWE), Hagen Heubach (SAP)
(Bild: Factory-x)")
:quality(80)/p7i.vogel.de/wcms/1e/e9/1ee9d6e483fa9e4f5e07c3a74ef2a3cd/adobestock-795201631--c2-a9-20org-20-e2-80-93-20stock-adobe-com-ki-generiert-8697x4896v1.jpeg "Die Zahl der offenen Stellen in der Elektroindustrie stieg im ersten Halbjahr 2026 deutlich an. (Bild: © ORG – stock.adobe.com / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/93/1a/931a35db6d90693283049b840dcacd2b/st-hannover-149-6048x3400v1.jpeg "Der fachliche Austausch zwischen Besucher und Aussteller ist das, was die Schraubtec ausmacht. (Bild: PHOTOVISION-DH GmbH)")
:quality(80)/p7i.vogel.de/wcms/68/89/6889ce824f7362d1ee31c6114039849d/0131677915v2.jpeg "Nur menschliche Empathie schafft echte Beziehungen. Führungskräfte, die Hoffnung vermitteln und Vertrauen im Alltag leben, verwandeln Risiken automatisierter Entscheidungen in Chancen, die Organisation und Mitarbeitende gleichermaßen stärken. (Bild: © Md - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/58/63/586379bda19d8f06e6015cecb41a4967/kampagnenbild-1947x1095v1.png "(Bild: ANSYS Germany GmbH )")
:quality(80)/p7i.vogel.de/wcms/d1/12/d112dfa6e7df4c7af715a4833483f659/0126977441v1.jpeg "DIN RAIL SMART PROTECTION: RACPRO1 E-FUSE MODULE (Bild: RECOM Power GmbH)")
Harvard University Kleine Roboter-Termiten bauen autonom
Termiten arbeiten zu hunderttausenden zusammen, um riesige Hügel zu bauen – ohne Bauplan, Vorarbeiter oder explizite Kommunikation. Als ein vergleichbares Bauwerk müssten wir Menschen - im Hinblick auf die Körpergröße der Termiten - ein Gebäude weit über 3.000 Meter errichten - zum Beispiel eine zweite Zugspitze. Ein kleiner Roboter-Bautrupp der Harvard University macht es jetzt den kleinen Insekten mit Bärenkräften nach.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/76800/76895/65.jpg "FAULHABER_120mm.jpg ()")
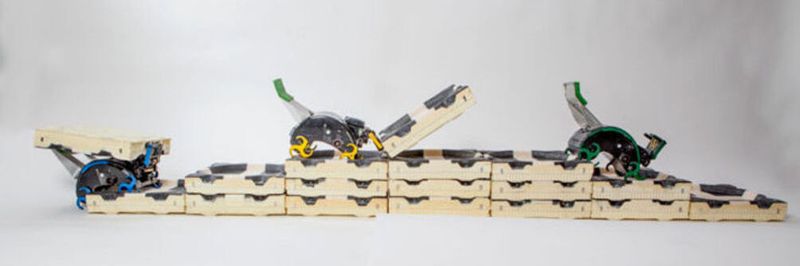
„Bei der Beobachtung von Termiten in der Wüste von Namibia kam uns die Erkenntnis, dass eine Gruppe wirklich komplexe Dinge schaffen kann, selbst wenn es weder Bauplan noch zentrale Steuerinstanz gibt, und sogar ohne explizite Kommunikation“, erinnert sich Radhika Nagpal, Professorin an der Harvard School of Engineering and Applied Sciences (SEAS) und Mitglied des Wyss Institute for Biologically Inspired Engineering, an die Anfänge des Projekte Termes. Innerhalb von vier Jahren gelang es Nagpal und ihren Mitarbeitern, dieses Verhalten auf einen autonomen Roboterschwarm zu übertragen, wie folgendes Video zeigt:
Dieses faszinierende Verhalten wird durch eine indirekte Kommunikation erreicht, die als Stigmergie bezeichnet wird. Stark vereinfacht gesagt, beobachtet dabei jedes Mitglied eines Schwarms die Veränderungen in seiner Umgebung und handelt entsprechend. Die Schönheit dieses Konzepts liegt vor allem in seiner Robustheit und Skalierbarkeit. Laut den Harvard-Forschern lässt sich der von ihnen geschaffene verteilte Algorithmus gleichermaßen auf fünf oder fünfhundert Roboter anwenden und wenn ein Teil der Roboter ausfällt, übernehmen einfach andere deren Aufgaben. Die Roboter selbst kommen dabei mit einer vergleichsweise simplen Hardware aus. Sie verfügen über vier einfache Arten von Sensoren und drei Aktuatoren. Damit sind sie in der Lage, sich Vorwärts und Rückwärts zu bewegen, auf ein Bauelement und wieder herunter zu klettern, und auf der Stelle zu drehen. Der Schlüssel liegt darin, dass sie als eine Einheit mit den Bauelementen entwickelt wurden.
:quality(80)/images.vogel.de/vogelonline/bdb/682200/682260/original.jpg "(Harvard University)")
:quality(80)/images.vogel.de/vogelonline/bdb/682200/682261/original.jpg "(Radhika Nagpal)")
„Das macht das ganze System sehr robust und senkt massiv die Anforderungen an die Rechenleistung jedes einzelnen Roboters“, erläutert Kirstin Petersen, die das Hardware-Design von Termes geleitet hat. Die Robo-Bauarbeiter verwenden als Prozessor einen Mikrocontroller vom Typ ATmega1281. Ob die Termes Roboter letztlich einen Turm oder eine Pyramide aus den Elementen zusammenbauen, ergibt sich nicht aus einem vordefinierten Bauplan, sondern aus einem Set von "Verkehrsregeln", denen die Roboter folgen und ihren Beobachtungen der Umgebung. Mögliche Anwendungen für solche autonomen dezentral agierenden Roboterschwärme sehen Radhika Nagpal und ihre Kollegen etwa in gefährlichen Umgebungen: So könnten entsprechende Systeme in flutgefährdeten Bereichen Sandsäcke aufschichten oder auf dem Mars Behausungen bauen. Doch vorher wollen die Forscher ihre Roboter noch etwas beobachten. Justin Werfel, Hauptautor eines Aufsatzes über Termes, der heute im Magazin Science erscheint:
„Wenn viele Schwarmmitglieder zusammenarbeiten – egal ob das Termiten, Bienen oder Roboter sind – lassen sich oft auf einer höheren Ebene Verhaltensweisen beobachten, die man aufgrund der Einzelkomponenten so nicht vorhergesagt hätte. Wir wollen noch besser verstehen, wie solche Effekte entstehen.“
(ID:42534440)
:quality(80)/p7i.vogel.de/wcms/1b/b7/1bb75330fc5e9def7ee000a8cd6ac4d3/0126325248v2.jpeg "Sonair präsentiert den weltweit ersten sicheren 3D-Ultraschallsensor für autonome Roboter. (Bild: Sonair)")
:quality(80)/p7i.vogel.de/wcms/fd/25/fd2533e6f6c5cc993cd78b86b63ade83/0128240938v1.jpeg "Die chinesische Hochgeschwindigkeits-Bahn „Gaotie“ soll künftig mit 350 km/h durch das Karstgebirge sausen. Der Yangcun-Tunnel wird Teil der neuen Strecke. (Bild: GPT Image Editor / KI-generiert)")